Adopting EtherCAT in a machine control project means solving three problems simultaneously: choosing a controller that can run real-time EtherCAT logic, selecting the right I/O and motion modules for the application, and writing control software without starting from scratch.
QEC is ICOP Technology’s answer to all three. It combines EtherCAT MDevices, distributed SubDevice modules, and the 86Duino IDE into a single integrated platform — designed for engineers who need to deploy EtherCAT without building everything from the ground up. This page explains how the QEC platform is architected, what makes it easier to develop on, and what hardware reliability features it includes.

For background on EtherCAT itself — cycle times, synchronization, topology, and performance benchmarks — see: The Benefits of Using EtherCAT in Industrial Automation → (https://www.qec.tw/ethercat/the-benefits-of-using-the-ethercat-transmission-standard/)
1. The QEC dual-core architecture (Framework)
QEC MDevices are built on the DM&P Vortex86EX2 processor, which operates two independent cores simultaneously.
The CPU Master core handles the 86Duino application environment — running user logic, managing Ethernet connectivity, and uploading data to external servers or databases such as MySQL, MariaDB, and Apache. The CPU Slave core runs the real-time EtherCAT MDevice driver — collecting and exchanging data with EtherCAT SubDevices at cycle times as low as 125µs, with jitter under 1µs.
The two cores exchange data through Inter-Processor Communication (IPC). This separation ensures that application-layer tasks — HMI updates, database writes, network communication — never interfere with the real-time EtherCAT control loop. The system also supports EtherCAT cable redundancy at the architecture level.
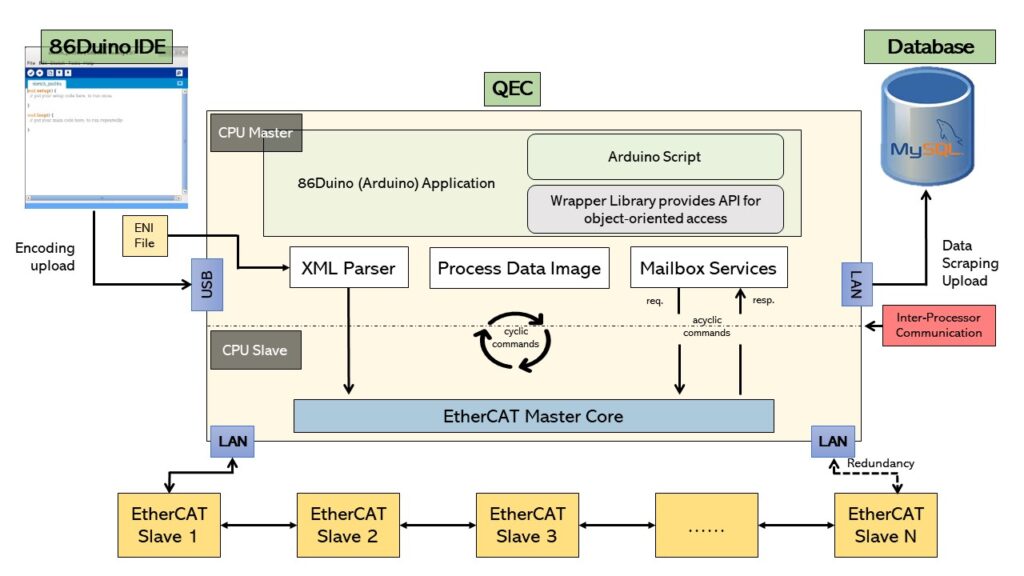
Read more: EtherCAT Library API User Manual.
2. Development with 86Duino IDE
QEC uses 86Duino IDE as its development environment — an industrial adaptation of the Arduino IDE that supports C/C++ programming with a full EtherCAT API, graphical configuration tools, and an extensive library ecosystem.
For engineers already familiar with Arduino, the transition to EtherCAT development is straightforward. Standard Arduino libraries — Ethernet, SPI, Modbus, CAN bus, I2C — work directly alongside the EtherCAT library. MySQL functions are also available for IIoT data pipeline integration.
For teams that prefer lower-code workflows, QEC provides three tools that reduce the amount of hand-written code required:
- 86EVA (EtherCAT-Based Virtual Arduino) — a graphical EtherCAT configuration tool for setting up MDevice and SubDevice parameters without writing configuration code.
- 86HMI Editor — an LVGL-based GUI design tool for building touchscreen interfaces on QEC Openframe and Panel PC models.
- ArduBlock — a drag-and-drop block programming environment for logic that does not require deep C/C++ knowledge.

A full reference for all supported libraries is available here: 86Duino Libraries Reference → (https://www.qec.tw/86duino/libraries/)
2.1 QEC Low-Code Development Kit User Operation Step-by-Step Video
3. Hardware reliability features
3.1 Power reliability
Dual isolated power inputs (Vs and Vp, 5–56VDC) with automatic OR-ing failover — if one power source fails, the system continues running from the other without interruption.
A single RJ45 cable can carry both Vs and Vp power simultaneously (up to 3A), with hardware protection against reverse polarity and overvoltage.
All SubDevices include internal monitoring of voltage, current, and operating temperature. This data is accessible via API for system health analysis and carbon footprint tracking.
3.2 Network reliability
EtherCAT cable redundancy is supported at the architecture level — dual network routing means a single cable failure does not shut down the network.
All QEC SubDevices are verified by the EtherCAT Conformance Test Tool (ET9400), confirming interoperability with third-party EtherCAT masters.
3.3 Installation and maintenance
Multi-color terminal blocks differentiate signal functions by color — reducing wiring errors during installation and speeding up field troubleshooting.
Hardware LED indicators display error codes when a SubDevice loses connection or encounters a fault — no software tool required to identify the problem.
Flexible Digital I/O configurations are available across the SubDevice range, allowing customers to select the channel count that matches the application without paying for unused capacity.
4. What you can build with QEC
QEC is used across a range of machine control applications. Common deployment scenarios include:
- Multi-axis motion control — QEC MDevices running EtherCAT at 125µs cycle time, paired with QEC-RXXMP3S stepper motor controllers or QEC-RXXMV3S pulse output modules. Supports CiA 402, G-code, and coordinated axis control via 86Duino IDE.
- Distributed digital and analog I/O — QEC-R SubDevice modules (Digital I/O, Analog I/O, Compound I/O) connected in line or star topology. Up to 1000 I/O points updated in 30µs.
- HMI + EtherCAT control in one unit — QEC Openframe and Panel PC MDevices combine a real-time EtherCAT controller with a 7″, 9″, or 15″ touchscreen LCD. 86HMI Editor and LVGL handle the display layer; the EtherCAT control loop runs independently on the slave core.
- Legacy Modbus and RS-485 migration — QEC-RXXHU Gateway modules bridge existing RS-232/485 serial devices, MPG handwheels, keypads, and LCM displays into an EtherCAT network — without replacing legacy field hardware.
- Third-party EtherCAT integration — QEC MDevices are compatible with SubDevices from Beckhoff, Delta, Panasonic, SANYO DENKI, OrientalMotor, NPM, FASTECH, and Moon’s. ESI files and Start Guides are available for all validated combinations. Online Resources → (https://www.qec.tw/resources/)
5. Talk to the QEC team
Ready to evaluate QEC for your next project? The QEC team can help with MDevice selection, SubDevice configuration, PoC planning, and integration support.
Talk to QEC → (https://www.qec.tw/contact/) Explore Products → (https://www.qec.tw/product-catalog/) Download 86Duino IDE → (https://www.qec.tw/software/)