










QEC-M-01 is an EtherCAT MDevice with real-time, reliable, and synchronous control. The industrial Arduino-like software makes it an easy-to-develop, stable, and economical automation system, allowing users to develop EtherCAT quickly.

The QEC MDevice is highly compatible with third-party EtherCAT devices for communication, such as servo, I/O, etc. It supports PDO, CoE, FoE, DC, and EtherCAT cable redundancy, so that other EtherCAT SubDevices can be used flexibly to take full advantage of EtherCAT. The QEC MDevice has precise synchronization (min.125μs), and its 86Duino IDE provides less than 1 us jitter time in the minimum cycle time; it could apply to highly synchronized and precision automatic applications, like motion control and I/O control. (Read More: EtherCAT MDevice Benchmark)
QEC-M-01 has a built-in high endurance 2GB SLC eMMC, designed to provide a stable and reliable operating system. Users can upload the developed executable files and required images or data, such as HMI images, to the QEC-M-01’s SLC via the 86Duino IDE without affecting the performance of the MDevice system.
QEC-M-01 can also monitor hardware information on temperature, voltage, and current. These features allow users to track the system’s carbon footprint and estimate its lifespan.
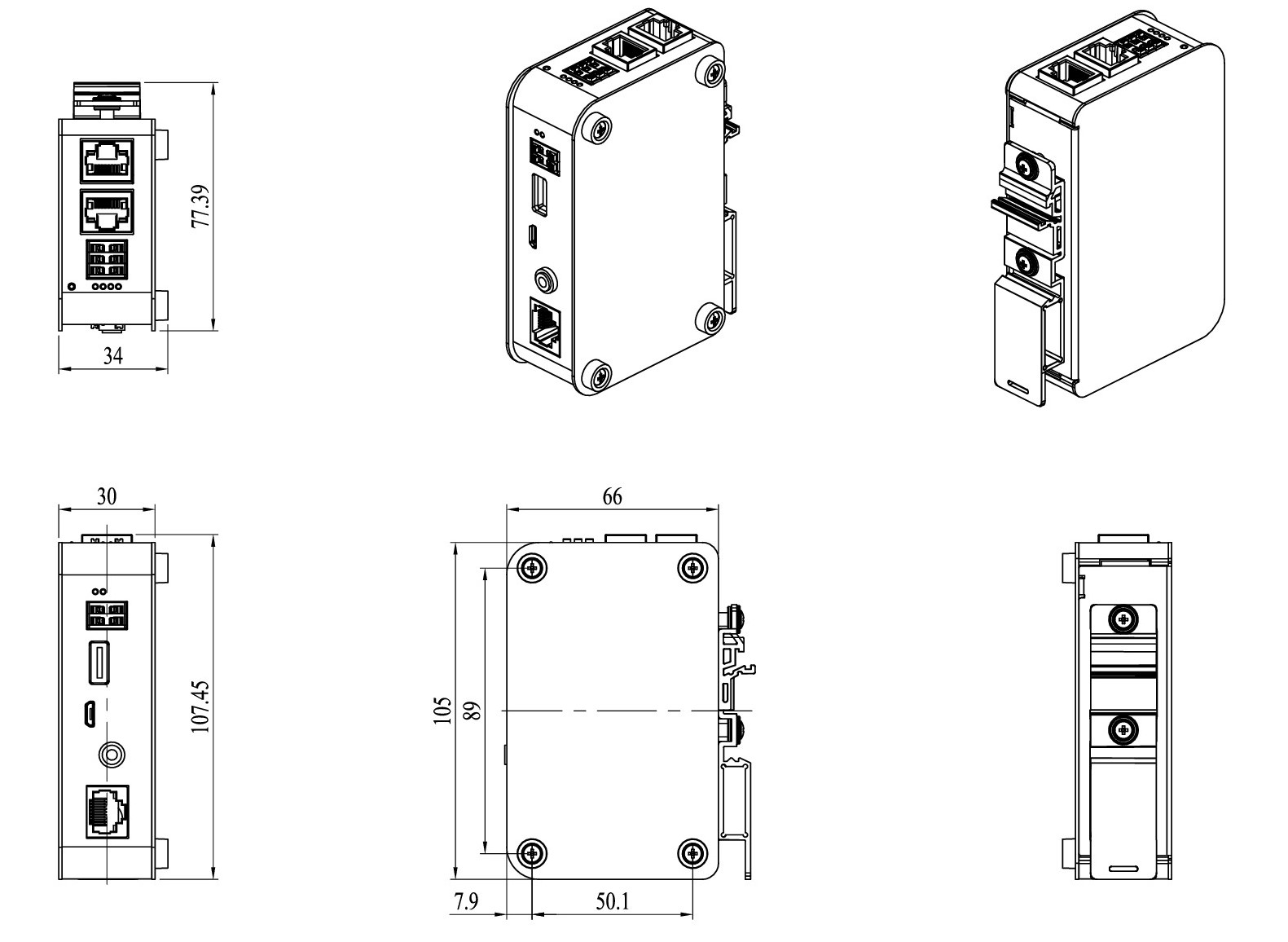
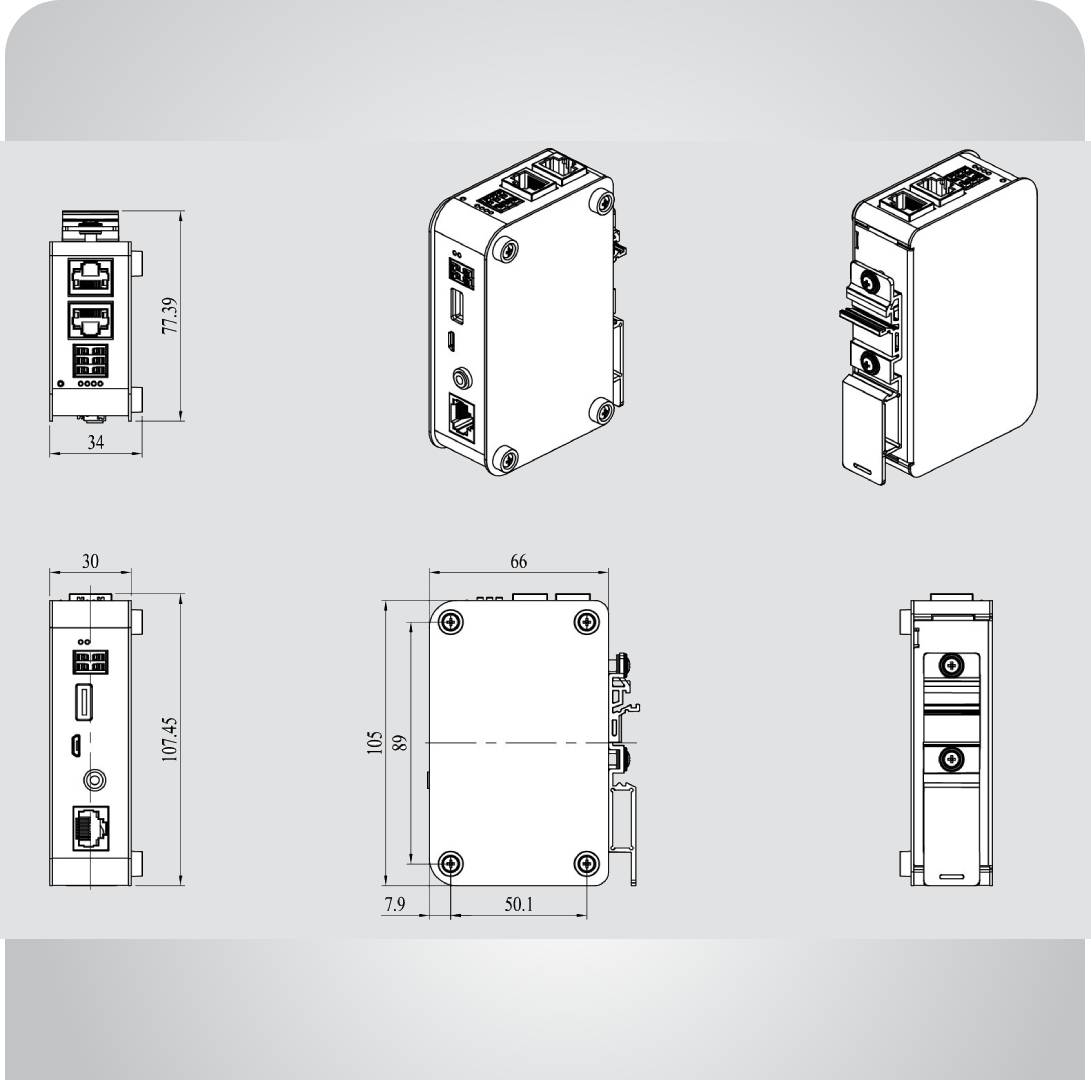
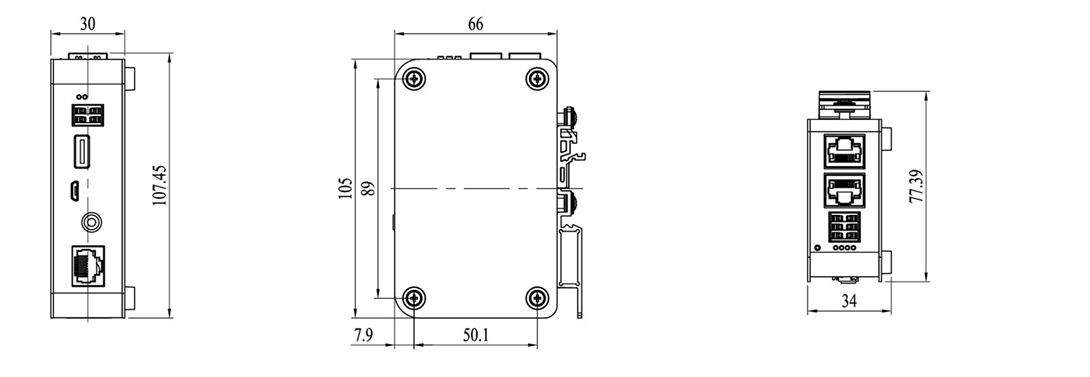
QEC-M-01’s dimensions are 107.45 x 77.39 x 34 mm, and it could be mounted via Din-Rail. Its operating temperature range is from -20°C to +70°C, and it can be placed directly in the field outdoors, ensuring that the machine can work in harsh environments.
QEC-M-01 has two networks for EtherCAT Cable Redundancy, one Giga LAN for external network connection, RS485 signal pins, HD Audio, and USB; All provide an off-the-shelf API to use. Users can quickly collect data over EtherCAT and transfer data to a server via Giga LAN, and then big data can easily to constructed by MySQL Library.
In addition, users can connect their existing systems via RS485 signals, such as PLC or CNC.