[Motion86]
Description
When setting the PPU (Pulse per Unit) using config_PPU, you can use the help calculation function to find the set parameters.
The relationship of PPU (Pulse per Unit) is shown in the following figure.
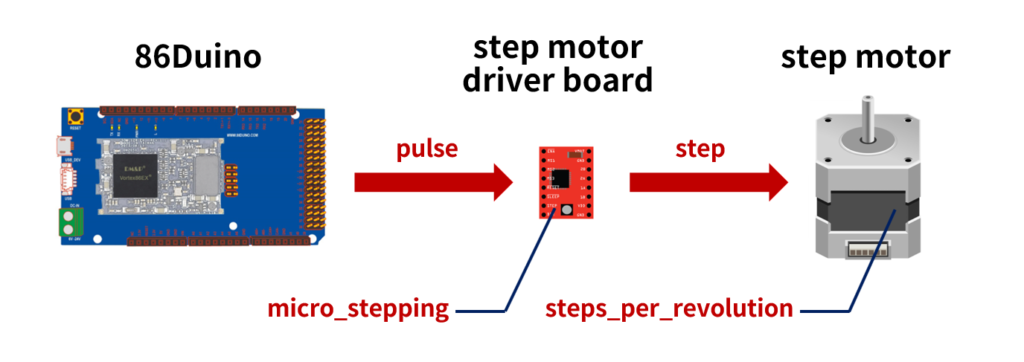
86Duino sends pulse to the stepper motor driver board, which sends step to rotate the stepper motor.
micro_stepping- The number of pulses received from the 86Duino to type a step on the stepper motor driver board.
steps_per_revolution- The parameter on the stepper motor, the number of steps to be received from the stepper motor driver board for one revolution.
The calculation formula for pulses_per_revolution is steps_per_revolution * micro_stepping.
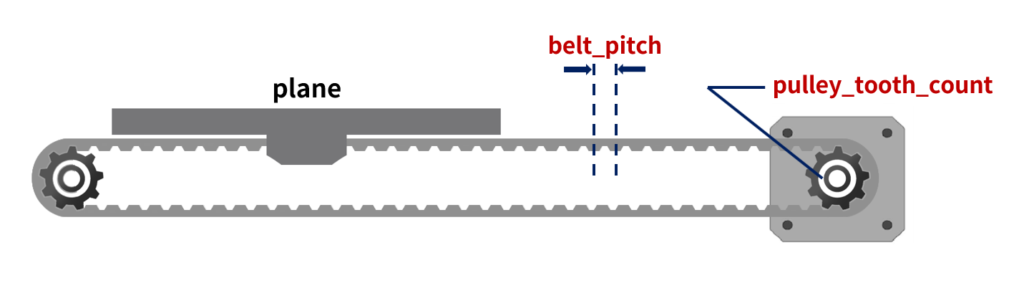
The parameters need to measure the belt pitch and the number of teeth of the gears, as follows.
Syntax
machine.computePPU_Belt(pulses_per_revolution, belt_pitch, pulley_tooth_count);
Parameters
machine: for Machine objects.pulses_per_revolution: The number of pulses that the 86Duino needs to hit to make one revolution of the stepper motor.blet_pitch: The belt pitch in millimeters.pulley_tooth_count: The number of teeth of the gears that rotate synchronously with the stepper motor.
Returns
double: The PPU (Pulse per Unit) after the return calculation.
See also
Libraries Reference Home
The text of the 86Duino reference is a modification of the Arduino reference and is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.