[Tutorial]
We’re pleased to share new technical start guides to help engineers and system integrators bring up QEC-M-01 (EtherCAT MDevice) with QEC-RXXD Series (EtherCAT Digital I/O Modules) for automation control.

These guides provide a step-by-step EtherCAT setup workflow, practical coding examples, and integration tips for graphical tools, so you can accelerate commissioning and reduce engineering time.
1. System Overview
1.1 About QEC MDevice
QEC-M-01 is a compact, high-performance EtherCAT MDevice designed for deterministic control and fast integration. Powered by the open-source 86Duino IDE, it provides a familiar development experience for automation engineers, together with a real-time multitasking architecture and integrated tools.
With EtherCAT PDO mapping/transfer, QEC-M-01 can exchange DI/DO data with QEC-RXXD modules in a fixed cycle for responsive and repeatable I/O control.
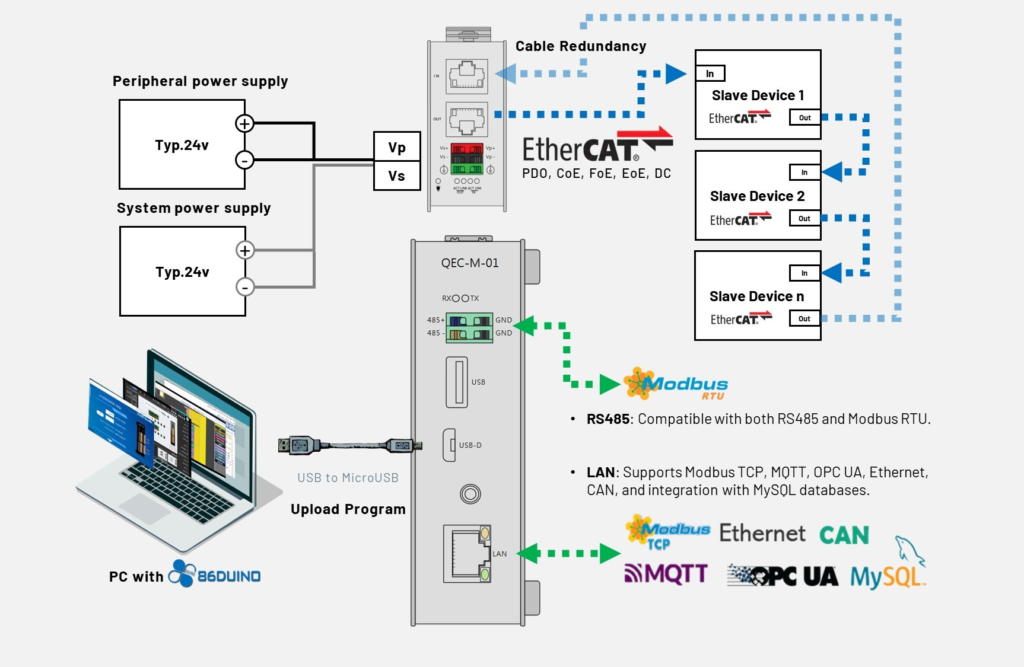
1.2 Benefits of the QEC-RXXD Series
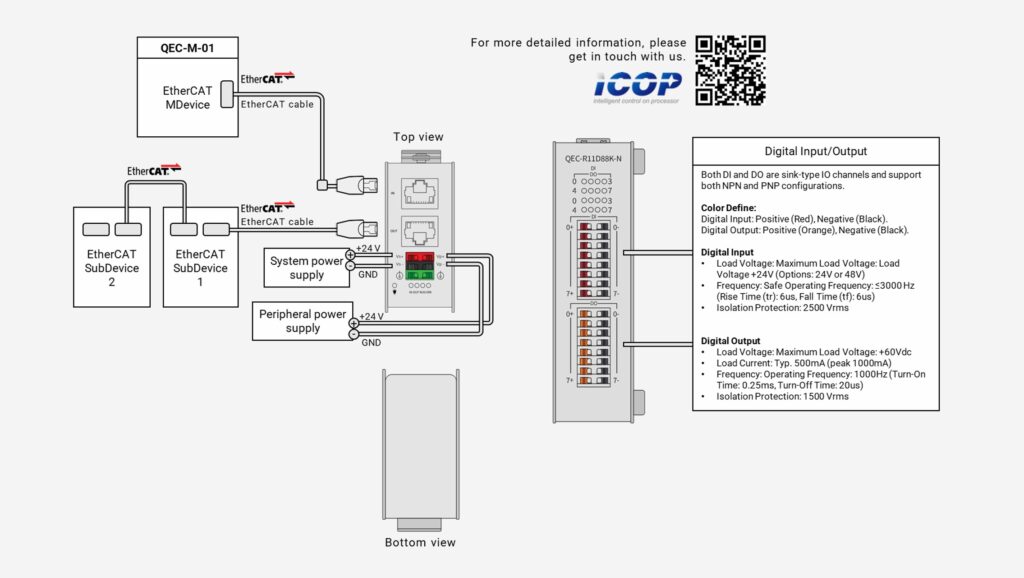
QEC-RXXD modules provide digital input/output (DI/DO) channels supporting both NPN and PNP wiring. They offer up to 16 isolated digital channels and support EtherCAT Distributed Clocks (DC) for precise synchronization across nodes. Cycle-time capability depends on the network and device configuration (typical systems start from 1 ms and optimize from there).
2. Advantages of the Start Guides (What you’ll get)
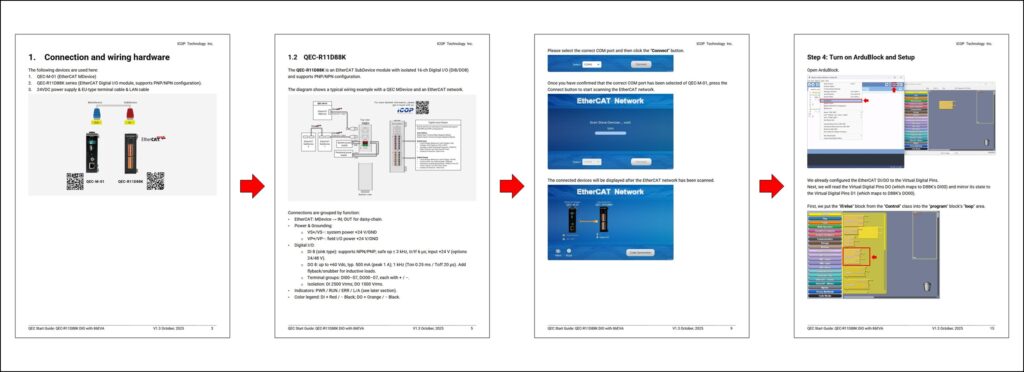
- Step-by-step setup guide
Wiring, EtherCAT network bring-up, and a recommended parameter checklist. - Programming examples
Practical code snippets and control-flow examples to help you implement I/O control quickly. - Integration tips & troubleshooting
Notes on common field issues and integration tips for graphical tools.
2.1 Write code
The following program sets:
- EtherCAT Cycle Time: 1 millisecond.
- EtherCAT Mode: ECAT_SYNC.
The EthercatMaster object (“master”) represents the QEC-M-01, while the EthercatDevice_QECR11D88K object (“slave0”) represents the QEC-R11D88K module.
In this section, we will read digital input DI00 (e.g., button) and mirror its state to digital output DO00 (e.g., LED/load).
The example code is as follows:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_QECR11D88K slave0;
void setup() {
Serial.begin(115200);
Serial.print("Begin: ");
Serial.println(master.begin());
Serial.print("Slave: ");
Serial.println(slave0.attach(0, master));
Serial.print("Start: ");
Serial.println(master.start(1000000, ECAT_SYNC));
}
void loop() {
if (slave0.digitalRead(0) == HIGH)
slave0.digitalWrite(0, HIGH);
else
slave0.digitalWrite(0, LOW);
}If you are interested in learning more, click the link below to view the complete guide:
Therefore, if you are building an EtherCAT automation system that requires fast and reliable Digital I/O, QEC-M-01 paired with the QEC-RXXD series provides a practical, deterministic solution through PDO-based cyclic data exchange.
For more info and sample requests, please write to info@icop.com.tw, call your nearest ICOP Branch, or contact our Worldwide Official Distributor.