[Tutorial]
1. Quick Start with EK1814 and EK1100 + EL1889 + EL2889
Digital input/output (DI/DO) remains a core element in industrial automation systems. To help engineers simplify EtherCAT I/O integration, ICOP Technology has released a QEC EtherCAT × Beckhoff DIO Development Guide, demonstrating how to control Beckhoff DIO modules using the QEC-M-01 EtherCAT MDevice.

This guide focuses on practical implementation—from wiring to software configuration—allowing engineers to quickly evaluate and deploy EtherCAT-based DI/DO systems.
1.1 Supported Beckhoff DIO Configurations
The guide covers two widely used Beckhoff EtherCAT DIO architectures:
- EK1814 – Integrated EtherCAT DI/DO Coupler
A compact solution combining EtherCAT coupler and DI/DO channels in a single module, ideal for small systems and fast validation. - EK1100 + EL1889 + EL2889 – Modular I/O System
A flexible and scalable architecture using separate DI and DO terminals, suitable for applications requiring higher I/O counts or future expansion.
1.2 From Wiring to Control
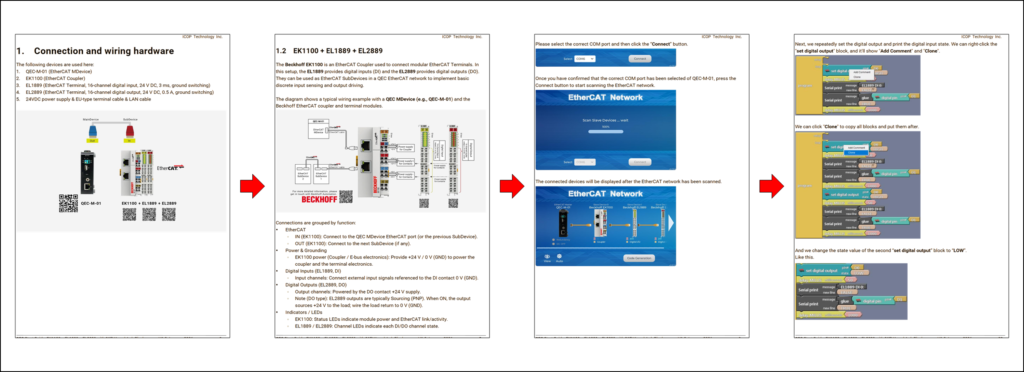
Step-by-step instructions guide users through:
- EtherCAT network wiring with QEC-M-01
- Power supply and grounding for DI/DO channels
- PNP (sourcing) DO characteristics and wiring notes
- Status LEDs and channel indicators
- QEC PoE and non-PoE usage considerations
Even first-time EtherCAT users can complete setup efficiently.
2. Flexible Development Options
The guide demonstrates multiple development approaches using the QEC software ecosystem:
- 86Duino IDE (C/C++) for direct EtherCAT I/O control
- 86EVA for graphical EtherCAT configuration and automatic code generation
- 86EVA + ArduBlock for low-code, block-based DI/DO control
This flexibility supports both rapid evaluation 以及 production-level development on the same hardware platform.
2.1 Write code
The following program sets:
- EtherCAT Cycle Time: 3 milliseconds (Depending on DI/DO filter).
- EtherCAT Mode: ECAT_SYNC.
Cycle time depends on module filter and application needs (e.g., 3 ms or 4 ms in the start guides).
The EthercatMaster object (“master”) represents QEC MDevice: QEC-M-01.
The EthercatDevice_Generic objects represent the Beckhoff terminals: EK1100 (“ek1100”), EL1889 (“el1889”), and EL2889 (“el2889”). In this section, we periodically toggle EL2889 DO0 (HIGH/LOW), then read and print EL1889 DI0 after a short settling delay to verify that the input state reflects the output change (for example, using an external loopback wiring between DO0 and DI0, or by driving an external signal into DI0).
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic ek1100;
EthercatDevice_Generic el1889;
EthercatDevice_Generic el2889;
void setup() {
Serial.begin(115200);
Serial.print("Begin: "); Serial.println(master.begin());
Serial.print("EK1100: "); Serial.println(ek1100.attach(0, master));
Serial.print("EL1889: "); Serial.println(el1889.attach(1, master));
Serial.print("EL2889: "); Serial.println(el2889.attach(2, master));
Serial.print("Start: ");
Serial.println(master.start(3000000, ECAT_SYNC));
}
void loop() {
el2889.pdoBitWrite(0, HIGH);
delay(50);
Serial.print("EL1889 DI 0: ");
Serial.println(el1889.pdoBitRead(0));
delay(1000);
el2889.pdoBitWrite(0, LOW);
delay(50);
Serial.print("EL1889 DI 0: ");
Serial.println(el1889.pdoBitRead(0));
delay(1000);
}If you are interested in learning more, click the link below to view the complete guide:
- EK1100 (Coupler) + EL1889 (16 DI) + EL2889 (16 DO)
- EK1814 (Coupler + DIO)
By combining the QEC EtherCAT MDevice with Beckhoff DIO modules, engineers can build a stable and expandable EtherCAT I/O system without being locked into a single vendor ecosystem or complex configuration workflow.
For more info and sample requests, please write to info@icop.com.tw, call your nearest ICOP Branch, or contact our Worldwide Official Distributor.