The QEC-RXXMP series is an EtherCAT stepper motor open-loop controller capable of high-speed synchronization at 250 μs while simultaneously driving three axes of two-phase bipolar stepper motors. Equipped with A, B, and Z encoder interfaces.
The QEC-RXXMP series has passed the verification of conformance testing tools and is suitable for various traditional industrial automation applications, such as management and precise motion control.
The QEC-RXXMP series is a standard EtherCAT SubDevice that requires an EtherCAT MDevice to operate the device. It supports three operating modes: Free Run, SyncManager2, and Distributed Clock (DC). It not only supports the CiA402 drive profile, a standard within EtherCAT, allowing seamless integration with a variety of control systems; But it also Equipped with G-code parser, a widely used programming language in CNC machine tools, a widely used programming language in CNC machine tools. This capability makes it adept in complex CNC machining and precise motion control domains.
This EtherCAT stepper motor controller can control three axes simultaneously with a high-speed 250 μs synchronization. It provides a maximum of 4.84A drive current, suitable for demanding motors, and allows precise control adjustments using DIP switches. The controller also conserves energy and reduces wear by lowering current when the motor is idle, extending the motor’s life. It simplifies wiring by using a single power source for all three axes. User can control motors with A, B, and Z encoder interfaces for accurate, interference resistant motor feedback. It supports up to 16 micro-steps for precise motor positioning and speed, ideal for high-precision tasks. Each motor has digital input channels for homing.
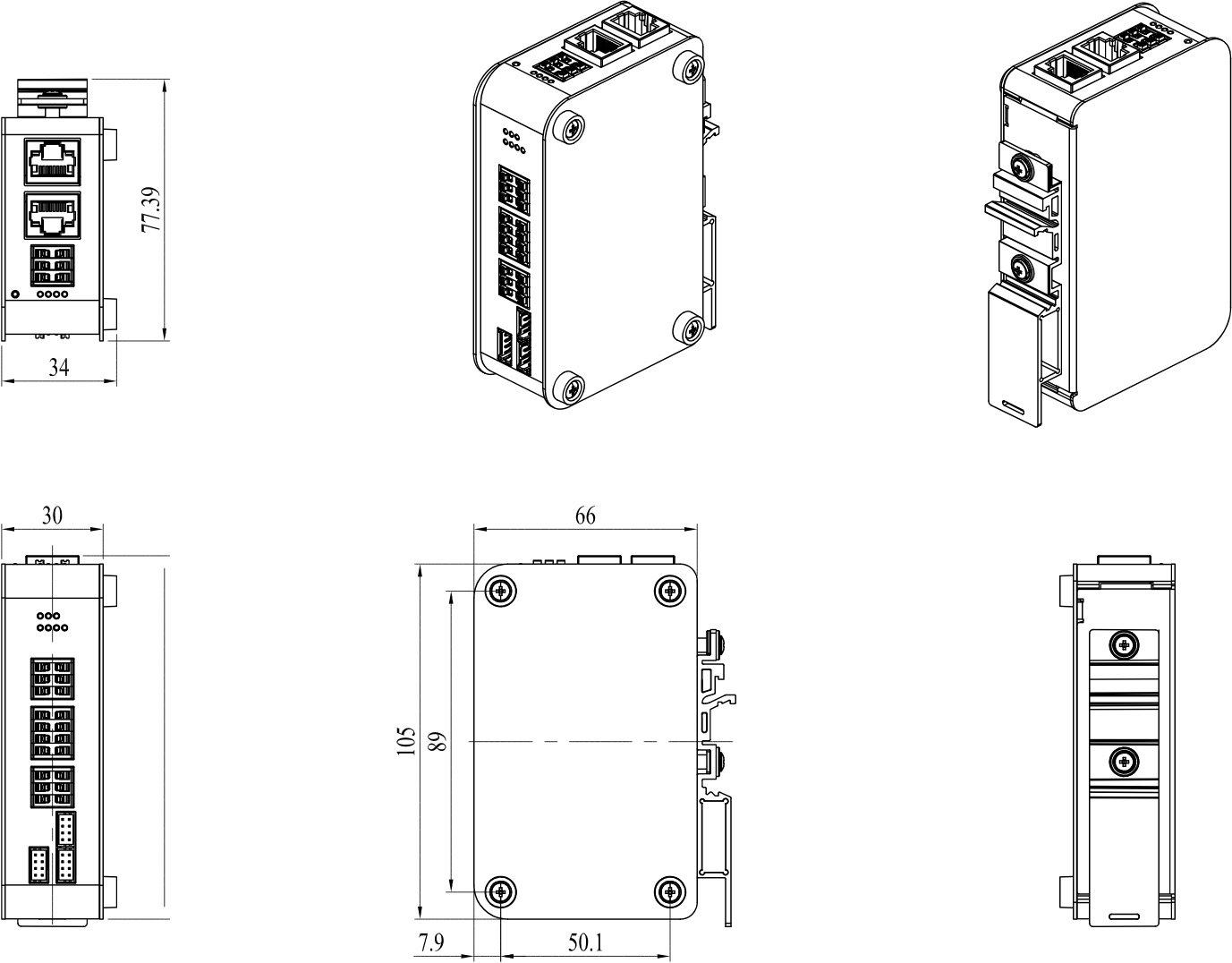
The QEC-RXXMP series has a compact size of 107.45 x 77.39 x 34 mm, making it very convenient for system installation via Din-Rail mounting. It operates within a temperature range of -20°C to +70°C and is equipped with two network ports for EtherCAT network redundancy, enhancing system reliability and stability.