2026.01.07, Version v3.3r0.
You can download the EtherCAT Library API User Manual file here.
1. Introduction
1.1 About QEC MDevice
QEC (Quicker, Easier Control with EtherCAT) is an EtherCAT controller developed by ICOP. It offers high synchronization and real-time capabilities, along with ease of development. Below, we’ll describe the architecture, features, and performance of QEC.
QEC MDevice is an EtherCAT MDevice System compatible with 86Duino Coding IDE 500+. It offers real-time EtherCAT communication between EtherCAT MDevice and EtherCAT SubDevices. Except for the EtherCAT Library of 86Duino IDE, QEC MDevice also provides Modbus, Ethernet TCP/IP, CAN bus, etc. industrial communication protocols and uses a rich high-level C/C++ programming language for rapid application development.
1.1.1 What is 86Duino IDE?
More about 86Duino IDE
The 86Duino integrated development environment (IDE) software makes it easy to write and upload code to 86Duino boards and QEC MDevice. It runs on Windows, Mac OS X, and Linux. The environment is written in Java and based on Arduino IDE, Processing, DJGPP, and other open-source software, which can be downloaded from https://www.qec.tw/software/.
QEC MDevice’s software, 86Duino IDE, also offers a configuration utility: 86EVA, a graphic user interface tool for users to edit parameters for the EtherCAT network; its functions are as follows:
- EtherCAT SubDevices scanning
- Import ENI file
- Setting EtherCAT MDevice
- Configure EtherCAT SubDevices
For other detailed functions, please refer to the 86EVA User Manual.
1.1.2 QEC EtherCAT MDevice Architecture
More about QEC EtherCAT MDevice Architecture
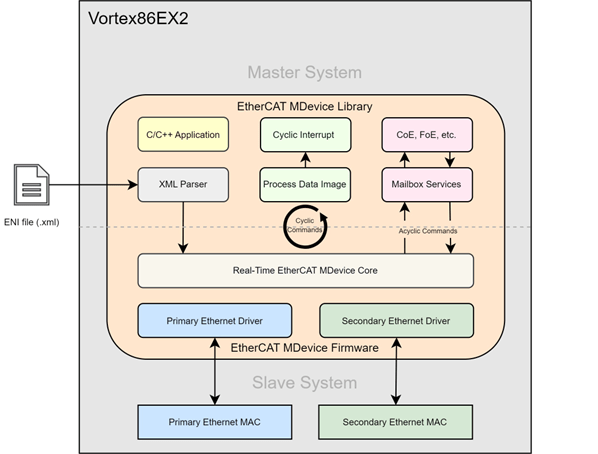
The EtherCAT MDevice software only runs on the Vortex86EX2 CPU produced by DM&P, which features a dual-system architecture. The EtherCAT MDevice software is primarily divided into two parts, each running on the respective systems of the Vortex86EX2 CPU.
They are responsible for the following tasks:
- EtherCAT MDevice Library
- Provides C/C++ application interfaces:
- Initialization interface.
- Configuration interface.
- Process Data (PDO) access interface.
- CAN application protocol over EtherCAT (CoE) access interface.
- File access over EtherCAT (FoE) access interface.
- SubDevice Information Interface (SII) access interface.
- Distributed Clocks (DC) access interface.
- Provides C/C++ application interfaces:
- EtherCAT MDevice Firmware
- Executes the EtherCAT MDevice Core.
- Controls the Primary/Secondary Ethernet Driver, sending EtherCAT frames
The programs are designed to run on the FreeDOS operating system and have been compiled using the GCC compiler provided by the DJGPP environment.
1.1.3 Hardware Platform
More about QEC Hardware Platform
The EtherCAT MDevice software only runs on the Vortex86EX2 CPU produced by DM&P, which features a dual-system architecture. It is divided into Master System and Slave System, each running its own operating system, with communication between systems facilitated by Dual-Port RAM and event interrupts.
Their respective tasks are as follows:
- Master System
- User’s EtherCAT application.
- User’s HMI application.
- User’s Ethernet application.
- And so on.
- Slave System
- Only responsible for running the EtherCAT MDevice Firmware.
As most applications run on the Master System, the EtherCAT MDevice Firmware running on the Slave System is free from interference by other applications. This setup allows it to focus on executing the EtherCAT MDevice Core, ensuring the synchronization and real-time capabilities of EtherCAT.
1.1.4 Dual-System Synchronization
More about QEC Daul-System Synchronization
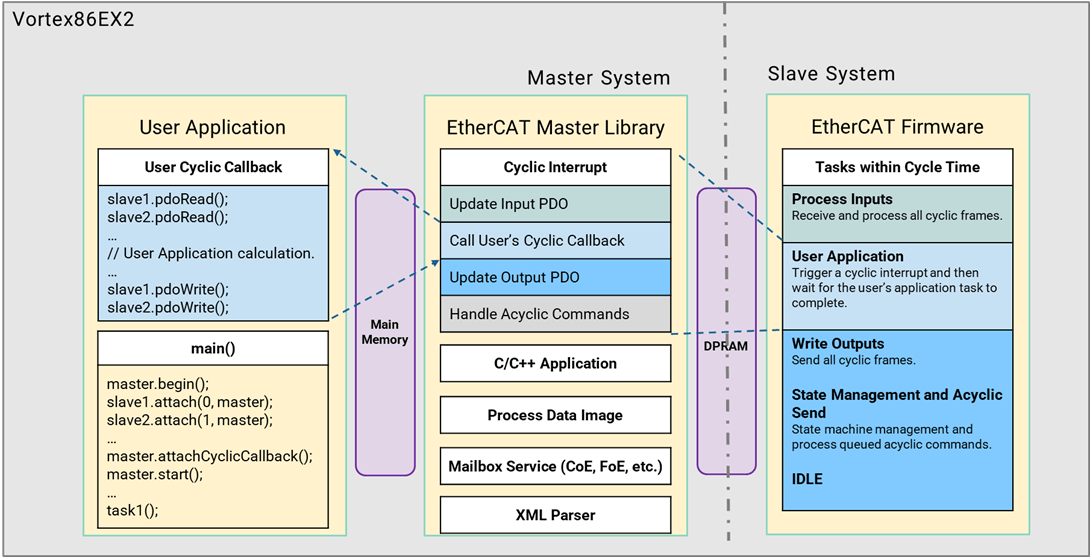
The primary focus of this section is the synchronization of dual-system PDO data. As illustrated in the diagram below, the User Application and EtherCAT MDevice Library blocks run on the Master System, while the Real-Time EtherCAT MDevice Core runs on the Slave System.
When the EtherCAT MDevice Core reaches the Process Inputs stage, it receives all cyclic frames from the Ethernet Driver and copies Input PDO data to the DPRAM.
Upon reaching the User Application stage, the EtherCAT MDevice Core triggers a Cyclic Interrupt to the Master System. Upon receiving the Cyclic Interrupt, the Master System executes the interrupt handling procedure of the EtherCAT MDevice Library. It moves Input PDO data from DPRAM to Main Memory, calls the user-registered Cyclic Callback, transfers Output PDO data from Main Memory to DPRAM after the Cyclic Callback completes, processes acyclic commands, and concludes the interrupt handling procedure. At this point, both the EtherCAT MDevice Core’s User Application and the interrupt handling procedure are completed simultaneously.
When the EtherCAT MDevice Core reaches the Write Outputs stage, it copies Output PDO data from DPRAM to the Ethernet Driver’s DMA and sends frames.
These tasks are executed periodically in a cyclic manner, following the outlined procedural steps, ensuring the synchronization of dual-system PDO data.
1.2 Features
The EtherCAT Technology Group defined two classes of EtherCAT MDevice software implementation in ETG.1500. This specification defines MDevice Classes with a well-defined set of MDevice functionalities.
In order to keep things simple only 2 MDevice Classes are defined:
- Class A: Standard EtherCAT MDevice
- Class B: Minimum EtherCAT MDevice
You will see the comparison among Class A, Class B, and our QEC MDevice as follows.
1.2.1 Feature Table
Word Usage:
- shall: equals is required to.
- should: equals is recommended that.
- may: equals is permitted to.
- O: equals supported.
Feature Table
| Feature Name | Short Description | Class A | Class B | QEC MDevice |
|---|---|---|---|---|
| Basic Features | ||||
| Service Commands | Support of all commands | shall if ENI import support | O | |
| IRQ field in datagram | Use IRQ information from SubDevice in datagram header | should | should | — |
| SubDevices with Device Emulation | Support SubDevices with and without application controller | shall | shall | O |
| EtherCAT State Machine | Support of ESM special behavior | shall | shall | O |
| Error Handling | Checking of network or slave errors, e.g. Working Counter | shall | shall | O |
| VLAN | Support VLAN Tagging | may | may | — |
| EtherCAT Frame Types | Support EtherCAT Frames | shall | shall | O |
| UDP Frame Types | Support UDP Frames | may | may | — |
| Process Data Exchange | ||||
| Cyclic PDO | Cyclic process data exchange | shall | shall | O |
| Multiple Tasks | Different cycle tasks. Multiple update rates for PDO | may | may | — |
| Frame repetition | Send cyclic frames multiple times to increase immunity | may | may | — |
| Network Configuration | ||||
| Online scanning | Network configuration functionality included in EtherCAT MDevice | at least one of them | O | |
| Reading ENI | Network Configuration taken from ENI file | at least one of them | O | |
| Compare Network configuration | Compare configured and existing network configuration during boot-up | shall | shall | O |
| Explicit Device Identification | Identification used for Hot Connect and prevention against cable swapping | should | should | O |
| Station Alias Addressing | Support configured station alias in SubDevice | may | may | — |
| Access to EEPROM | Support routines to access EEPROM via ESC register | Read shall / Write may | O | |
| Mailbox Support | ||||
| Support Mailbox | Main functionality for mailbox transfer | shall | shall | O |
| Mailbox Resilient Layer | Support underlying resilient layer | shall | shall | O |
| Multiple Mailbox channels | Simultaneous Mailbox protocol transfer to one device | may | may | — |
| Mailbox polling | Polling Mailbox state in SubDevices | shall | shall | — |
| CAN application layer over EtherCAT (CoE) | ||||
| SDO Up/Download | Normal and expedited transfer | shall | shall | O |
| Segmented Transfer | Segmented transfer | shall | should | O |
| Complete Access | Transfer the entire object (with all sub-indices) at once | shall | should (shall if ENI Import supported) | O |
| SDO Info service | Services to read object dictionary | shall | should | O |
| Emergency Message | Receive Emergency messages | shall | shall | — |
| PDO in CoE | PDO services transmitted via CoE | may | may | — |
| EoE | ||||
| EoE protocol | Services for tunneling Ethernet frames. includes all specified EoE services | shall | shall if EoE support | — |
| Virtual Switch | Virtual Switch functionality | shall | shall if EoE support | — |
| EoE Endpoint to Operation Systems | Interface to the Operation System on top of the EoE layer | should | should if EoE support | — |
| FoE | ||||
| FoE Protocol | Support FoE Protocol | shall | shall if FoE support | O |
| Firmware Up/Download | Password, FileName should be given by the application | shall | should | O |
| Boot State | Support Boot-State for Firmware Up/Download | shall | shall if FW UP/Download | O |
| SoE | ||||
| SoE Services | Support SoE Services | shall | shall if SoE support | — |
| AoE | ||||
| AoE Protocol | Support AoE Protocol | should | should | — |
| VoE | ||||
| VoE Protocol | External Connectivity supported | may | may | — |
| Synchronization with Distributed Clock (DC) | ||||
| DC support | Support of Distributed Clock | shall | shall if DC support | O |
| Continuous Propagation Delay compensation | Continuous Calculation of the propagation delay | should | should | — |
| Sync window monitoring | Continuous monitoring of the Synchronization difference in the SubDevices | should | should | — |
| SubDevice-to-SubDevice Communication | ||||
| via MDevice | Information is given in ENI file or can be part of any other network configuration. Copying of the data can be handled by MDevice stack or MDevice’s application | shall | shall | — |
| MDevice information | ||||
| MDevice Object Dictionary | Support of MDevice Object Dictionary (ETG.5001 MDP sub profile 1100) | should | may | — |
1.3 Feature Packs
1.3.1 Cable Redundancy
More about Cable Redundancy
EtherCAT Cable Redundancy refers to the capability of the EtherCAT communication system to maintain continuous and reliable communication even in the event of a cable failure. Cable Redundancy employs a ring topology, which is operated in both directions. If one cable fails or is disconnected, another cable path still works to ensure uninterrupted communication. Cable Redundancy enhances the fault tolerance of the EtherCAT network, minimizing downtime and improving overall system reliability.
Three scenarios are listed as below regarding whether the cable is broken or not in Cable Redundancy. The following you will see how to work for Cable Redundancy, and the differences for the EtherCAT MDevice Controller between these scenarios.
- Without Cable Broken
- Cable Broken between two SubDevices
- Cable broken between MDevice and SubDevice
For ease of explanation, some assumptions will be made here:
- Assume Cycle Time is set to 125 µs.
- Assume all SubDevices only with input PDO (without output PDO), the working counter (WKC) in process data frame will increase 1 when passing through every SubDevices.
- Assume only have 6 SubDevices on EtherCAT network, and the expected working counter (EWKC) is 6.
- Primary Port and Secondary Port send process data frame in every cycle at the same time.
For more details on cable redundancy, please visit the EtherCAT Feature Packs: Cable Redundancy.
1.4 Benchmark
EtherCAT is a fieldbus technology known for its high synchronization capabilities. In applications requiring high synchronization, there is often a demand for real-time performance and high control frequencies. Users in these scenarios typically consider specifications such as:
- Support for shorter cycle times
- Support for more process data
- Support for more EtherCAT SubDevices
However, assessing whether an EtherCAT MDevice meets the user’s application requirements often involves benchmark measurements as a primary consideration.
Please visit EtherCAT MDevice Benchmark for more details.
1.4.1 EtherCAT MDevice Cyclic Frame Jitter
The jitter in the transmission of the cyclic frame from the EtherCAT MDevice, which is referenced to DC SYNC0.
1.5 Synchronization
More about Synchronization
The time synchronization among all SubDevices in an EtherCAT network relies on the Distributed Clocks (DC) unit within the EtherCAT SubDevice Controller (ESC), ensuring consistency across the entire system. Typically, the first SubDevice with DC serves as the system reference clock to synchronize other SubDevices with DC.
For a more detailed explanation of DC, please refer to Distributed Clocks.
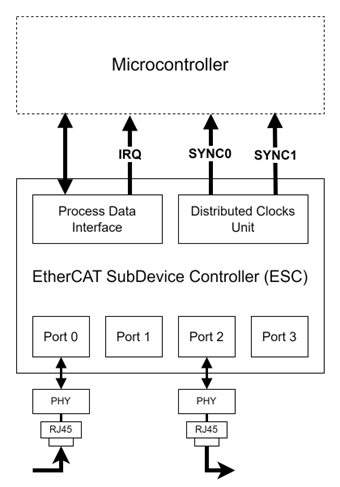
The ESC has three synchronization output pins: IRQ, SYNC0, and SYNC1. The IRQ pin generates a signal to the upper-layer microcontroller (µC) after the ESC receives EtherCAT Cyclic Frames. SYNC0 and SYNC1 pins cyclically generate signals to the µC based on the configuration in the DC related registers of ESC. Hence, if an EtherCAT SubDevice does not have a µC, it does not support synchronization functionality.
There are three synchronization modes in EtherCAT:
- Free Run
- SM-Synchronous
- DC-Synchronous
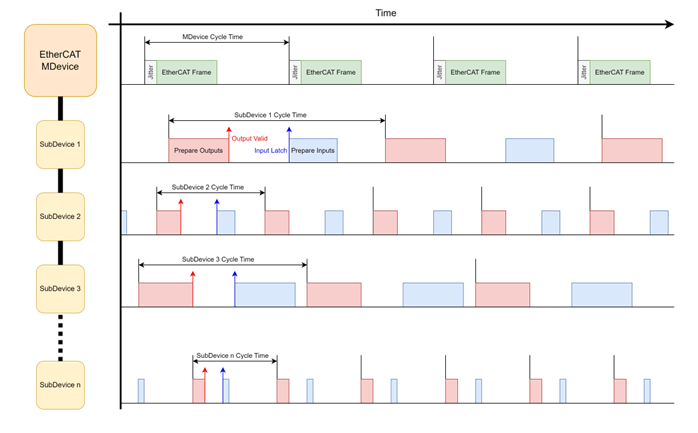
1.5.1 Free Run
More about Free Run Mode
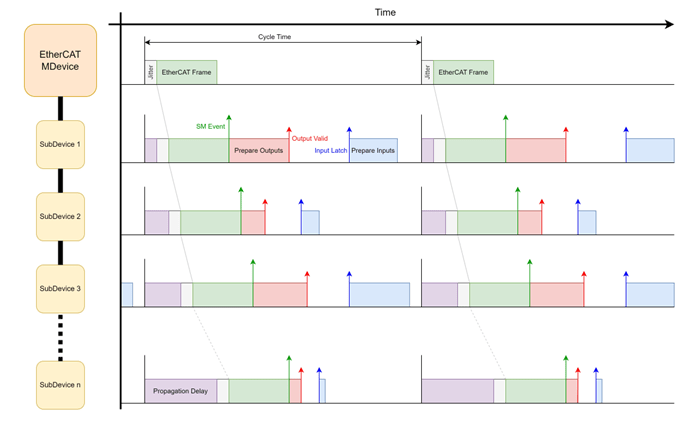
The EtherCAT MDevice and all EtherCAT SubDevices each have their own local timer, and their cycle times are independent, so they are not synchronized. As shown in the diagram below, both the EtherCAT MDevice and SubDevice 1, SubDevice 2, SubDevice 3 to SubDevice n have their own Cycle Time, resulting in inconsistent Output Valid and Input Latch. This scenario is not suitable for applications with high synchronization requirements.
1.5.2 SM-Synchronous
More about SM-Synchronous Mode
The IRQ pin generates a SM event when the cyclic frame is received by ESC, this event will trigger the execution of the local application in µC. As shown in the diagram below, cyclic frames are received by SubDevices with the same jitter of MDevice in sending them. Even assuming zero jitter, due to finite hardware Propagation Delay the last SubDevices will receive the cyclic frames later with respect to the first ones.
Due to the Propagation Delay, there is an offset in the timing of SM events between SubDevices, resulting in an accuracy of SM-Synchronous at the microsecond level.
If each SubDevice supports the Shift Time in the SyncManager Parameter objects (0x1C32.3/0x1C33.3), it is possible to attempt to adjust the Output Valid and Input Latch of all SubDevices to be close to each other. However, due to the inability to calculate the propagation delays, the adjustment is quite challenging.
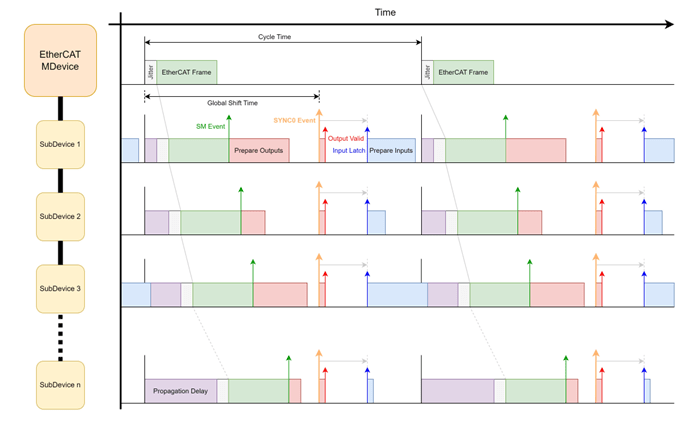
1.5.3 DC-Synchronous
More about DC-Synchronous Mode
The SYNC0 or SYNC1 pins generate SYNC events cyclically based on the configuration in the DC related registers of ESC, this event will trigger the execution of the local application in µC. As shown in the diagram below, jitters and propagation delays still exist, and SM events are still triggered after receiving cyclic frames. However, in this DC-Synchronous method, SYNC0 events are triggered cyclically, which does not suffer from jitter or propagation delays.
Because SYNC0 events are triggered by the DC unit and all SYNC0 events among the SubDevices have almost no offset, thanks to the periodic sending of APRW/FPRW commands to synchronize the system time of all SubDevices, the accuracy can reach the nanosecond level.
If the SubDevices support the Shift Time in SyncManager Parameter objects (0x1C32.3/0x1C33.3), it is possible to attempt to adjust the Output Valid and Input Latch timings of these SubDevices to the same time point.
However, the selection of the Global Shift Time in the diagram is crucial, but must meet the following conditions:
- After the cyclic frames have been received by all SubDevices.
- Before sending the cyclic frames for the next cycle.
- According to different DC-Synchronous methods, it may need to be selected after executing Prepare Outputs:
- Trigger µC to execute Prepare Outputs when the SM event occurs
- Trigger µC to execute Output Valid when the SYNC event occurs.
The correct Global Shift Time is not unique; it can be chosen within the entire interval of the cycle time. To learn more about various DC-Synchronous methods, please refer to ETG.1020 EtherCAT Protocol Enhancements.
2. Functions
QEC EtherCAT MDevice Library.
EtherCAT is a real-time industrial Ethernet communication protocol widely used in automation and control systems. QEC-MDevice is an EtherCAT MDevice library implemented in C/C++, which includes classes for the MDevice, generic SubDevice, CiA 402 SubDevice, and dedicated classes for QEC SubDevice series. These classes not only have clearly defined responsibilities but also consider future extensibility.
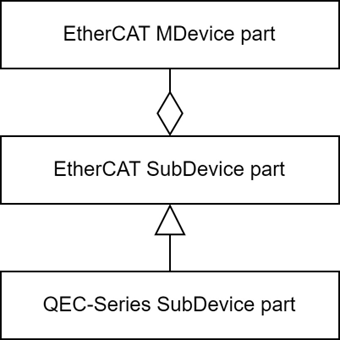
These classes can be divided into three parts as follows:
- EtherCAT MDevice
The EtherCAT MDevice part not only provides various and flexible MDevice configuration and operation functions but also offers diverse EtherCAT SubDevice operation functions for invocation by the EtherCAT Device part.
- EtherCAT Device
The EtherCAT Device part provides generic EtherCAT SubDevice classes, which can operate functions such as PDOs, CoE, FoE, and also includes CiA 402 SubDevice generic class.
- QEC Series Device
The QEC Series Device part provides dedicated functions for ICOP’s QEC series SubDevices, enabling users to code in a more user-friendly and concise manner.
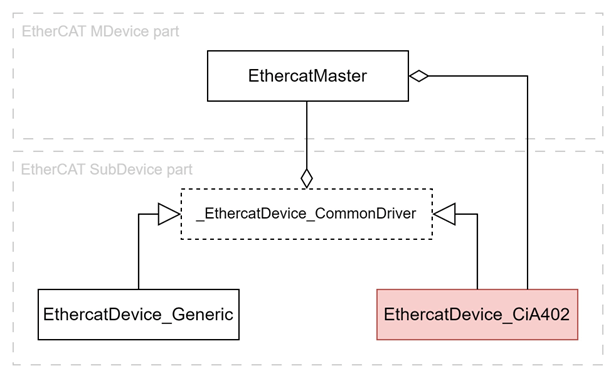
2.1 EtherCAT MDevice
The EtherCAT MDevice part not only provides various and flexible MDevice configuration and operation functions but also offers diverse EtherCAT SubDevice operation functions for invocation by the EtherCAT Device part.
EthercatMaster is the only class in the EtherCAT MDevice part, it serves as a crucial communication bridge with the EtherCAT firmware. In the Dual-System communication aspect, its responsibilities include communication interface initialization, process data exchange cyclically, handling acyclic transfer interfaces, and managing interrupt events. In the API aspect, it provides functions related to MDevice initialization, MDevice control, and access to SubDevice information.
The main class relationship between the EtherCAT MDevice part and the EtherCAT Device part is association, with the EtherCAT Device part depending on the EtherCAT MDevice part.
The class relationships of EthercatMaster are illustrated in the following diagram:

2.1.1 EtherCAT MDevice Settings
This library offers a variety of configuration parameters for users to choose from, aiming to meet the diverse application needs of users.
Below are the configuration parameters provided by this library.
typedef struct {
EthercatDcSyncMode DcSyncMode;
uint32_t StaticDriftCompensationFrames;
uint32_t StateMachineTimeoutI2P;
uint32_t StateMachineTimeoutP2S;
uint32_t StateMachineTimeoutS2O;
uint32_t ScanNetworkTimeout;
uint32_t StartMasterTimeout;
uint32_t StartDeviceTimeout;
uint32_t ErrorDetectWkcMultipleFaultsThreshold;
uint32_t ErrorDetectMultipleLostFramesThreshold;
uint32_t EnableErrorBusReactionSyncUnitToSafeOp:1,
EnableErrorBusReactionSyncUnitToSafeOpAutoRestart:1,
IgnoreBiosOverride:1;
} EthercatMasterSettings;DcSyncMode
Default: ECAT_MASTER_SHIFT
In DC-Synchronous mode, the first SubDevice with DC serves as the system reference clock to synchronize other SubDevices with DC. However, this only involves synchronizing the system time of all SubDevices on the network and does not include the EtherCAT MDevice. In applications with DC-Synchronous mode enabled, the MDevice usually needs to precisely and periodically control the SubDevices, so the MDevice must also synchronize its system time with all SubDevices on the network.
There are two methods for this synchronization:
- MDevice Shift Mode –
ECAT_MASTER_SHIFT
- The MDevice system time is synchronized to the reference clock.
- All DC SubDevices are synchronized to the reference clock.
- Bus Shift Mode –
ECAT_BUS_SHIFT
- The reference clock is synchronized to the MDevice system time.
- All DC SubDevices are synchronized to the reference clock.
StaticDriftCompensationFrames
Default: 30000
The EtherCAT MDevice sends many separate ARMW or FRMW drift compensation frames to distribute the System Time of the reference clock to all DC SubDevices.
StateMachineTimeoutI2P
Default: 3000; Unit: milliseconds
Timeout for the transition from the Init state to the Pre-Operational state.
StateMachineTimeoutP2S
Default: 10000; Unit: milliseconds
Timeout for the transition from the Pre-Operational state to the Safe-Operational state.
StateMachineTimeoutS2O
Default: 10000; Unit: milliseconds
Timeout for the transition from the Safe-Operational state to the Operational state.
ScanNetworkTimeout
Default: 5000; Unit: milliseconds
Timeout for scan network. The scan network operation is executed within EthercatMaster::begin().
StartMasterTimeout
Default: 3000; Unit: milliseconds
Base timeout for start MDevice, Tbase.
In EthercatMaster::start(), the firmware is requested to start EtherCAT, and the timeout for this request is referred to as startup timeout, Tstartup.
The startup timeout for EtherCAT is calculated as follows: Tstartup = Tbase + (TSubDevice × NSubDevices) .
Here, NSubDevices is the number of SubDevices on the network.
StartDeviceTimeout
Default: 500; Unit: milliseconds
Timeout per SubDevice for start MDevice, TSubDevice.
ErrorDetectWkcMultipleFaultsThreshold
Default: 3
The MDevice should check the Working Counter of a received EtherCAT datagram. If the Working Counter does not match with the expected value an error is detected. When the number of consecutive errors exceeds this parameter, an ECAT_ERR_WKC_MULTIPLE_FAULTS error interrupt will be triggered.
ErrorDetectMultipleLostFramesThreshold
Default: 3
The MDevice may use the index of the EtherCAT datagram header to check if all sent EtherCAT datagrams will be received. If EtherCAT datagrams are lost an error is detected. When the number of consecutive errors exceeds this parameter, an ECAT_ERR_MULTIPLE_LOST_FRAMES error interrupt will be triggered.
EnableErrorBusReactionSyncUnitToSafeOp
Default: 0
If this parameter is set to 1, the MDevice will change the EtherCAT state of the SubDevices with an application controller and will disable the Sync Manager channels of the SubDevices which only support the EtherCAT state machine emulation.
EnableErrorBusReactionSyncUnitToSafeOpAutoRestart
Default: 1
This parameter only takes effect if EnableErrorBusReactionSyncUnitToSafeOp is set to 1. If this parameter is set to 1, the MDevice will automatically attempt to restart the Sync Unit according to the Restart Behavior of a Sync Unit in the MDevice as defined in ETG.1020 EtherCAT Protocol Enhancements, switching the EtherCAT state machine back to the Operational state.
IgnoreBiosOverride
Default: 0
QEC-MDevice has some EtherCAT configuration parameters in the BIOS. Setting this parameter to 1 means ignoring the EtherCAT configuration parameters in the BIOS; otherwise, they are not ignored.
2.1.2 Initialization Functions
Before starting the EtherCAT MDevice, it must be initialized. This library offers a variety of configuration parameters for users to choose from, aiming to meet the diverse application needs of users.
| Function | Description |
|---|---|
begin() | Initialize the EtherCAT MDevice, scan all EtherCAT SubDevices on the network, and switch the EtherCAT state machine to the Pre-Operational state. |
end() | Deinitialize the EtherCAT MDevice. |
isRedundancy() | Check if the EtherCAT MDevice has cable redundancy enabled. |
ibraryVersion( ) | Get the EtherCAT MDevice library version. |
firmwareVersion( ) | Get the EtherCAT firmware version. |
readSettings() | Read the current EtherCAT MDevice settings. |
saveSettings() | Save the EtherCAT MDevice settings. |
2.1.3 Control Functions
The control functions provided by the EtherCAT MDevice library are crucial for managing the state and operation of the EtherCAT network. By using these functions, users can ensure precise control over the network, achieving reliable and synchronized communication between the MDevice and SubDevices.
| Function | Description |
|---|---|
start() | Start the EtherCAT MDevice, configure the SM, FMMU, and DC registers of all SubDevices, and switch the EtherCAT state machine to the Operational state. |
stop() | Stop the EtherCAT MDevice. |
update() | Update process data and handle acyclic commands. |
setShiftTime() | Set the Global Shift Time for DC-Synchronous mode. |
getShiftTime() | Get the Global Shift Time for DC-Synchronous mode. |
getSystemTime() | Get the system time of the current cycle. |
getWorkingCounter() | Get the working counter for the current cycle. |
getExpectedWorkingCounter() | Get the expected working counter. |
2.1.4 Callback Functions

This library provides three types of callbacks as follows:
Cyclic Callback
The purpose of the Cyclic Callback is to allow users to implement periodic control systems such as motion control, CNC control, and robot control. The Real-Time EtherCAT MDevice Core triggers cyclic interrupts to the EtherCAT MDevice Library at specified cycle time, then waiting for an ACK to ensure process data synchronization. If a user has registered a Cyclic Callback, it will be invoked to achieve periodic control.
Error Callback
When the Real-Time EtherCAT MDevice Core detects an error, it will trigger an error interrupt and pass a 32-bit error code to the EtherCAT MDevice Library. If the user has registered an error callback, the system will invoke that callback to inform the user of the specific error.
The error codes supported by the Error Callback are as follows:
| Definition | Code | Description |
ECAT_ERR_WKC_SINGLE_FAULT | 2000001 | Working counter fault occurred. |
ECAT_ERR_WKC_MULTIPLE_FAULTS | 2000002 | Multiple working counter faults occurred. |
ECAT_ERR_SINGLE_LOST_FRAME | 2000003 | Frame was lost. |
ECAT_ERR_MULTIPLE_LOST_FRAMES | 2000004 | Frames were lost multiple times. |
ECAT_ERR_CABLE_BROKEN | 2000007 | The cable is broken. |
ECAT_ERR_WAIT_ACK_TIMEOUT | 2001000 | Firmware timeout waiting for cyclic interrupt ACK. |
Event Callback
When the Real-Time EtherCAT MDevice Core detects an event, it triggers an event interrupt and passes a 32-bit event code to the EtherCAT MDevice Library. If the user has registered an event callback, the system will invoke that callback to inform the user of the specific event.
The event codes supported by the Event Callback are as follows:
| Definition | Code | Description |
ECAT_EVT_STATE_CHANGED | 1000001 | The EtherCAT state of the MDevice has changed. |
ECAT_EVT_CABLE_RECONNECTED | 1000002 | The cable has been reconnected. |
Functions:
| Function | Description |
|---|---|
attachCyclicCallback() | Register a cyclic callback. |
detachCyclicCallback() | Unregister the cyclic callback. |
attachErrorCallback() | Register an error callback. |
detachErrorCallback() | Unregister the error callback. |
attachEventCallback() | Register an event callback. |
detachEventCallback() | Unregister the event callback. |
errGetCableBrokenLocation1() | Get cable broken location 1. (Error Callback only) |
errGetCableBrokenLocation2() | Get cable broken location 2. (Error Callback only) |
evtGetMasterState() | Get the EtherCAT MDevice state. (Event Callback only) |
2.1.5 SubDevice Information Functions
This library provides functions to obtain information about EtherCAT SubDevices on the network. It includes querying the number of SubDevices on the network, retrieving a SubDevice’s Vendor ID, Product Code, Alias Address by its sequence number, and reverse querying the SubDevice number using the aforementioned information. This is used to identify the type of SubDevice and to choose the appropriate EtherCAT SubDevice class to attach.
| Function | Description |
|---|---|
getSlaveCount() | Get the number of SubDevices on the network. |
getVendorID() | Get the Vendor ID of the specified SubDevice. |
getProductCode() | Get the Product Code of the specified SubDevice. |
getRevisionNumber() | Get the Revision Number of the specified SubDevice. |
getSerialNumber() | Get the Serial Number of the specified SubDevice. |
getAliasAddress() | Get the Alias Address of the specified SubDevice. |
getSlaveNo() | Find the sequence number of a matching SubDevice on the network. |
2.2 EthercatDevice
The EtherCAT Device part provides generic EtherCAT SubDevice classes, which can operate functions such as PDOs, CoE, FoE, and also includes CiA 402 SubDevice generic class.
The main class relationship between the EtherCAT Device part and the EtherCAT MDevice part is association, with the EtherCAT Device part depending on the EtherCAT MDevice part. As shown in the diagram below, there is an association relationship between _EthercatDevice_CommonDriver and EthercatMaster.
Diagram

2.2.1 _EthercatDevice_CommonDriver
_EthercatDevice_CommonDriver is an abstract class that not only features functions for accessing SubDevice information but also provides various EtherCAT function access methods, including PDO, SII, CoE, FoE, DC, etc. All EtherCAT SubDevice classes inherit from it.
The class relationships of _EthercatDevice_CommonDriver are illustrated in the following diagram:

2.2.1.1 Information Functions
The library provides functions for obtaining information about EtherCAT SubDevices on the network. This includes essential details such as Vendor ID, Product Code, Alias Address, and Device Name, used for device identification. Moreover, it offers information on whether the EtherCAT SubDevice supports specific features like CoE, FoE, DC, etc. This SubDevice information enables users to understand the characteristics and capabilities of devices within the network and perform corresponding configuration and control tasks.
| Function | Description |
|---|---|
getVendorID() | Get the Vendor ID. |
getProductCode() | Get the Product Code. |
getRevisionNumber() | Get the Revision Number. |
getSerialNumber() | Get the Serial Number. |
getAliasAddress() | Get the Alias Address. |
getSlaveNo() | Get the sequence number on the EtherCAT network. |
getDeviceName() | Get the device name. |
getMailboxProtocol() | Get the supported mailbox protocol types. |
getCoEDetails() | Get the details about CoE support. |
getFoEDetails() | Get the details about FoE support. |
getEoEDetails() | Get the details about EoE support. |
getSoEChannels() | Get the number of SoE channels supported. |
isSupportDC() | Check if the SubDevice supports Distributed Clock. |
2.2.1.2 Process Data Objects (PDO) Functions
Process Data refers to real-time communication data exchanged between the MDevice and SubDevices in an EtherCAT network. This data includes information used for control, monitoring, and communication purposes. The EtherCAT MDevice cyclically transmits process data to control and monitor all SubDevices, ensuring high synchronization and low latency.
The Fieldbus Memory Management Units (FMMU) in the EtherCAT SubDevice Controller (ESC) can mapping dual-port memory to logical address. All SubDevice nodes check the EtherCAT frames sent by the EtherCAT MDevice, comparing the logical address of the process data with the configured address in the FMMU. If a match is found, the output process data is transferred to dual-port memory, and the input process data is inserted into the EtherCAT frame.
Overall, process data is an essential part of EtherCAT technology and is suitable for real-time applications in robot control, CNC control, automation control, and other fields.
| Function | Description |
|---|---|
pdoBitWrite() | Write 1-bit output process data. |
pdoBitRead() | Read 1-bit input process data. |
pdoGetOutputBuffer() | Get the memory pointer of output process data. |
pdoGetInputBuffer() | Get the memory pointer of input process data. |
pdoWrite() | Write multiple bytes of output process data. |
pdoWrite8() | Write 8-bit output process data. |
pdoWrite16() | Write 16-bit output process data. |
pdoWrite32() | Write 32-bit output process data. |
pdoWrite64() | Write 64-bit output process data. |
pdoRead() | Read multiple bytes of input process data. |
pdoRead8() | Read 8-bit input process data. |
pdoRead16() | Read 16-bit input process data. |
pdoRead32() | Read 32-bit input process data. |
pdoRead64() | Read 64-bit input process data. |
2.2.1.3 CANopen over EtherCAT (CoE) Functions
CoE (CAN application over EtherCAT) is a CANopen protocol based on the EtherCAT network. It enables communication using the CANopen protocol over EtherCAT networks. The Object Dictionary contains parameters, application data and the mapping information between process data interface and application date (PDO mapping). Its entries can be accessed via Service Data Objects (SDO).
The SDO services primarily consist of two types of commands. The SDO command is utilized for accessing objects stored in the Object Dictionary, while the SDO information command is employed to retrieve details about these objects.
About CANopen
CANopen is a high-level communication protocol based on the Controller Area Network (CAN) bus, commonly used for communication between control systems and devices in industrial applications. It defines a set of communication objects, data types, and network management functions to facilitate data exchange, configuration, and control between devices.
The CANopen protocol includes the following aspects:
- Object Dictionary
Defines all data objects and parameters exchanged between devices. The object dictionary encompasses various types of objects such as variables, parameters, events, and functions. - PDO (Process Data Object)
Used for real-time data transmission. PDOs allow devices to transmit data between each other in a fixed or event-triggered manner, enabling real-time control and data exchange. - SDO (Service Data Object)
Used for configuring and managing device parameters. SDOs provide functionalities for reading, writing, and parameter configuration, allowing devices to dynamically exchange configuration information.

SDO commands:
| Function | Description |
|---|---|
sdoDownload() | Write multiple bytes of data to the object. |
sdoDownload8() | Write 8-bit value to the object. |
sdoDownload16() | Write 16-bit value to the object. |
sdoDownload32() | Write 32-bit value to the object. |
sdoDownload64() | Write 64-bit value to the object. |
sdoUpload() | Read multiple bytes of data from the object. |
sdoUpload8() | Read 8-bit value from the object. |
sdoUpload16() | Read 16-bit value from the object. |
sdoUpload32() | Read 32-bit value from the object. |
sdoUpload64() | Read 64-bit value from the object. |
SDO Information commands:
| Function | Description |
|---|---|
getODlist() | Get a list of objects in the Object Dictionary. |
getObjectDescription() | Get the object description. |
getEntryDescription() | Get the entry description of the object. |
2.2.1.4 File over EtherCAT (FoE) Functions
File access over EtherCAT (FoE) is a protocol extension of EtherCAT that enables file transfer capabilities over the EtherCAT network. It specifies a standard way to download a firmware or any other files to the EtherCATSubDevice or to upload a firmware or any other files from the EtherCAT SubDevice.
FoE Diagram

Functions:
| Function | Description |
|---|---|
readFoE() | Read a file from the EtherCAT SubDevice. |
writeFoE() | Write a file to the EtherCAT SubDevice. |
2.2.1.5 Distributed Clock (DC) Functions
The Distributed Clocks (DC) is an essential functional unit within the EtherCAT SubDevice Controller (ESC).
More about Distributed Clock (DC)
The Distributed Clocks (DC) is an essential functional unit within the EtherCAT SubDevice Controller (ESC). It is responsible for implementing a time synchronization mechanism across the EtherCAT network, ensuring that all SubDevices synchronize their clocks according to a unified time reference, thus ensuring consistency of time across the entire system.
For system synchronization all SubDevices are synchronized to one Reference Clock. Typically, the first ESC with Distributed Clocks capability after the MDevice within one segment holds the reference time (System Time). This System Time is used as the reference clock to synchronize the DC SubDevice clocks of other devices and of the MDevice. The propagation delays, local clock sources drift, and local clock offsets are taken into account for the clock synchronization.
The ESCs can generate SyncSignals for local applications to be synchronized to the EtherCAT System Time. SyncSignals can be used directly (e.g., as interrupts) or for Digital Output updating/Digital Input sampling. Additionally, LatchSignals can be time stamped with respect to the EtherCAT System Time.

The DC unit supports the generation of a base SyncSignal SYNC0 and a dependent SyncSignal SYNC1. The second SyncSignal (SYNC1) depends on SYNC0, it can be enerated with a predefined delay after SYNC0 pulses.
If the SYNC1 Cycle Time is larger than the SYNC0 Cycle Time, it will be generated as follows: when the Start Time Cyclic Operation is reached, a SYNC0 pulse is generated. The SYNC1 pulse is generated after the SYNC0 pulse with a delay of SYNC1 Cycle Time. The next SYNC1 pulse is generated when the next SYNC0 pulse was generated, plus the SYNC1 Cycle Time.
Some example configurations are shown in the following figure:

For more detailed information, please refer to ESC Hardware Data Sheet Section I.
Functions:
| Function | Description |
|---|---|
setDc() | Configure DC parameters. |
2.2.1.6 SII EEPROM Functions
EtherCAT SubDevice controllers use a mandatory NVRAM, typically a serial EEPROM with I²C interface, to store EtherCAT SubDevice Information (ESI). This information includes Vendor ID, Product Code, Mailbox Configuration, FMMU, PDO, and so on. EEPROM sizes from 1 Kbit up to 4 Mbit are supported, depending on the ESC.
The ESC Configuration Area (EEPROM word addresses 0 to 7) is automatically read by the ESC after power-on or reset. It contains the PDI configuration, DC settings, and the Configured Station Alias. The consistency of the ESC Configuration data is secured with a checksum. For more detailed information, please refer to ESC Hardware Data Sheet Section I.
| Function | Description |
|---|---|
readSII() | Read multiple bytes of data from the SII EEPROM. |
readSII8() | Read 8-bit value from the SII EEPROM. |
readSII16() | Read 16-bit value from the SII EEPROM. |
readSII32() | Read 32-bit value from the SII EEPROM. |
writeSII() | Write multiple bytes of data to the SII EEPROM. |
writeSII8() | Write 8-bit value to the SII EEPROM. |
writeSII16() | Write 16-bit value to the SII EEPROM. |
writeSII32() | Write 32-bit value to the SII EEPROM. |
2.2.2 EthercatDevice_Generic
EthercatDevice_Generic is a generic EtherCAT SubDevice class that can be used to control all EtherCAT SubDevices, including accessing SubDevice information, PDO, CoE, FoE, DC, and more.
The class relationships of EthercatDevice_Generic are illustrated in the following diagram:

2.2.2.1 Initialization Functions
Initialization-related functions for the EthercatDevice_Generic class.
| Function | Description |
|---|---|
attach() | Initialize the object and attach it to EthercatMaster. |
detach() | Deinitialize the object and detach from EthercatMaster. |
2.2.3 EthercatDevice_CiA402
EthercatDevice_CiA402 is a generic CiA 402 EtherCAT SubDevice class designed to control any EtherCAT servo drive that supports the CiA 402 standard.
More about EthercatDevice_CiA402
EthercatDevice_CiA402 is a generic CiA 402 EtherCAT SubDevice class designed to control any EtherCAT servo drive that supports the CiA 402 standard.
It provides access functions for commonly used CiA 402 objects and operation functions for several CiA 402 operation modes and function groups, including:
- Operation Modes
- Profile Position (pp)
- Profile Velocity (pv)
- Profile Torque (tq)
- Homing (hm)
- Cyclic Synchronous Position (csp)
- Cyclic Synchronous Velocity (csv)
- Cyclic Synchronous Torque (CST)
- Function Groups
- Touch Probe
Implementation Directive for CiA402 Drive Profile.
Directive for using IEC 61800-7-201 within EtherCAT-based servo drives.
For more detailed information about CiA 402, please refer to the following documents:
- CiA Draft Standard 402: CANopen device profile drives and motion control
- ETG.6010 Implementation Directive for CiA402 Drive Profile
- User manual for the currently used CiA 402 drive device
The class relationships of EthercatDevice_CiA402 are illustrated in the following diagram:
- EthercatDevice_CiA402 inherits from _EthercatDevice_CommonDriver.
- Base Class: _EthercatDevice_CommonDriver
For more details on EthercatDevice_CiA402 class, please see EtherCAT CiA402 APIs.
2.3 QEC Series Device
The QEC-Series Device part provides dedicated functions for ICOP’s QEC series SubDevices, enabling users to code in a more user-friendly and concise manner.
The main class relationship between the QEC-Series Device part and the EtherCAT Device part is association, with the QEC-Series Device part depending on the EtherCAT Device part.
As shown in the diagram below
As shown in the diagram below, there is an association relationship between _EthercatDevice_DmpCommonDriver and _EthercatDevice_CommonDriver.

Classes:
- _EthercatDevice_DmpCommonDriver
- EthercatDevice_DmpDIQ_Generic
- EthercatDevice_DmpAIQ_Generic
- EthercatDevice_DmpHID_Generic
- EthercatDevice_DmpStepper_Generic
2.3.1 _EthercatDevice_DmpCommonDriver
_EthercatDevice_DmpCommonDriver is an abstract class that provides dedicated access functions for EtherCAT SubDevice specific features developed by ICOP. These functions include system monitoring (temperature, voltage, current), order information, MTBF, etc.
The class relationships of _EthercatDevice_DmpCommonDriver are illustrated in the following diagram:

2.3.1.1 System Monitoring Functions
The QEC series EtherCAT SubDevices with MCU all provide CoE objects to obtain system monitoring information, including system temperature, system voltage, system current, peripheral voltage, and peripheral current. Therefore, this library provides functions to get system monitoring information, enabling users to promptly monitor the system and evaluate it for any signs of failure.
| Function | Description |
|---|---|
getSystemTemperature() | Get the system temperature. |
getSystemPowerVoltage() | Get the system power voltage. |
getSystemPowerCurrent() | Get the system power current. |
getPeripheralPowerVoltage() | Get the peripheral power voltage. |
getPeripheralPowerCurrent() | Get the peripheral power current. |
tryToGetSystemTemperature() | Try to get the system temperature in a non-blocking manner. |
tryToGetSystemPowerVoltage() | Try to get the system power voltage in a non-blocking manner. |
tryToGetSystemPowerCurrent() | Try to get the system power current in a non-blocking manner. |
tryToGetPeripheralPowerVoltage() | Try to get the peripheral power voltage in a non-blocking manner. |
tryToGetPeripheralPowerCurrent() | Try to get the peripheral power current in a non-blocking manner. |
2.3.1.2 MTBF Functions
MTBF stands for Mean Time Between Failures. It is a reliability metric that measures the average time between failures of a system or component. It is calculated by dividing the total time of operation by the number of failures that occur during that time. The result is an average value that can be used to estimate the expected service life of the system or component. MTBF is a useful metric for tracking the reliability of systems and components, and for identifying potential design flaws or manufacturing defects. It can also be used to make decisions about preventive maintenance schedules.
The QEC series EtherCAT SubDevices with MCU all provide CoE objects to obtain MTBF-related information. Therefore, this library provides functions to get these MTBF-related information, allowing users or users to provide it to the manufacturer to assess and judge the life and failure of the device.
| Function | Description |
|---|---|
getWorkingHours() | Get the working hours. |
getBootTimes() | Get the boot times. |
tryToGetWorkingHours() | Try to get the working hours in a non-blocking manner. |
tryToGetBootTimes() | Try to get the boot times in a non-blocking manner. |
2.3.1.3 Order Information Functions
The QEC series EtherCAT SubDevices with MCU all provide CoE objects to obtain customer order-related information, which is pre-burned into the devices before shipment. Therefore, this library provides functions to get these customer order information, facilitating inquiries when necessary.
| Function | Description |
|---|---|
getCustomer() | Get the working hours.Get customer information. |
getOrderNumber() | Get the order number. |
getInvoiceNumber() | Get the invoice number. |
getDeliveryDate() | Get the delivery date. |
2.3.2 EthercatDevice_DmpDIQ_Generic
EthercatDevice_DmpDIQ_Generic is an EtherCAT SubDevice class specifically developed by ICOP for Digital I/O EtherCAT SubDevice modules. It provides APIs for digital input, digital output, and other functionalities.
2.3.3 EthercatDevice_DmpAIQ_Generic
EthercatDevice_DmpAIQ_Generic is an EtherCAT SubDevice class specifically developed by ICOP for Analog I/O EtherCAT SubDevice modules. It provides APIs for analog input, analog output, and other functionalities.
2.3.4 EthercatDevice_DmpCIQ_Generic
EthercatDevice_DmpCIQ_Generic is an EtherCAT SubDevice class specifically developed by ICOP for Compound I/O EtherCAT SubDevice modules. It encompasses Digital I/O, Analog I/O, and RS232/RS485 functionalities.
2.3.5 EthercatDevice_DmpHID_Generic
EthercatDevice_DmpHID_Generic is an EtherCAT SubDevice class specifically developed by ICOP for QEC EtherCAT SubDevice HID modules. It encompasses RS232/RS485, 4×4 Keypad, 16×2 LCM, Manual Pulse Generator (MPG), and Buzzer functionalities.
2.3.6 EthercatDevice_DmpStepper_Generic
EthercatDevice_DmpStepper_Generic is an EtherCAT SubDevice class developed for the DM&P Group’s 3-axis stepper motor controller EtherCAT SubDevice module. This module features motor drivers, encoder inputs, and other CNC-related functions. In the motor control section, it not only supports the CiA 402 mode but also the 3-axis synchronous G-code mode.
3. Examples
3.1 SubDevice Information Examples
SubDevice Information Examples.
3.1.1 Example 1: Using EthercatMaster class
Show SubDevice information using EthercatMaster class.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
void setup() {
Serial.begin(115200);
while (!Serial);
master.begin(); // Initialize EtherCAT Master in Pre-OP state
Serial.println("Starting EtherCAT Master...");
// Print Out All Slave Information
for (int i = 0; i < master.getSlaveCount(); i++) {
Serial.print("Slave ");
Serial.print(i);
Serial.print(" VID: ");
Serial.print(master.getVendorID(i), HEX);
Serial.print(", PID: ");
Serial.print(master.getProductCode(i), HEX);
Serial.print(", Rev: ");
Serial.print(master.getRevisionNumber(i), HEX);
Serial.print(", Ser: ");
Serial.print(master.getSerialNumber(i), HEX);
Serial.print(", Alias: ");
Serial.print(master.getAliasAddress(i));
Serial.println();
}
}
void loop() {
// put your main code here, to run repeatedly:
}3.1.2 Example 2: Using EthercatDevice_Generic class
Show SubDevice information using EthercatDevice_Generic class.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic slave;
char name[256];
void setup() {
Serial.begin(115200);
while (!Serial);
master.begin(); // Initialize EtherCAT Master in Pre-Operational state
for (int i = 0; i < master.getSlaveCount(); i++) {
slave.attach(i, master); // Attach the slave to the master
Serial.print("Slave ");
Serial.println(i);
Serial.print(" Name: ");
Serial.println(slave.getDeviceName(name, 256));
Serial.print(" Vendor ID: 0x");
Serial.println(slave.getVendorID(), HEX);
Serial.print(" Product Code: 0x");
Serial.println(slave.getProductCode(), HEX);
Serial.print(" Revision Number: 0x");
Serial.println(slave.getRevisionNumber(), HEX);
Serial.print(" Serial Number: 0x");
Serial.println(slave.getSerialNumber(), HEX);
Serial.print(" Alias Address: ");
Serial.println(slave.getAliasAddress());
Serial.print(" Mailbox Protocol: 0x");
Serial.println(slave.getMailboxProtocol(), HEX);
Serial.print(" CoE Details: 0x");
Serial.println(slave.getCoEDetails(), HEX);
Serial.print(" FoE Details: 0x");
Serial.println(slave.getFoEDetails(), HEX);
Serial.print(" EoE Details: 0x");
Serial.println(slave.getEoEDetails(), HEX);
Serial.print(" SoE Channels: ");
Serial.println(slave.getSoEChannels());
Serial.print(" DC Supported: ");
Serial.println(slave.isSupportDC());
}
}
void loop() {
// put your main code here, to run repeatedly:
}3.1.3 Example 3: Using EthercatDevice_CiA402 class
Show SubDevice information using EthercatDevice_CiA402 class.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_CiA402 slave;
char name[256];
void setup() {
Serial.begin(115200);
while (!Serial);
master.begin(); // Initialize EtherCAT Master in Pre-Operational state
for (int i = 0; i < master.getSlaveCount(); i++) {
// Attach the slave to the master
if (slave.attach(i, master) < 0) {
continue; // Skip this slave if attachment fails
}
Serial.print("Slave ");
Serial.println(i);
Serial.print(" Name: ");
Serial.println(slave.getDeviceName(name, 256));
Serial.print(" Vendor ID: 0x");
Serial.println(slave.getVendorID(), HEX);
Serial.print(" Product Code: 0x");
Serial.println(slave.getProductCode(), HEX);
Serial.print(" Revision Number: 0x");
Serial.println(slave.getRevisionNumber(), HEX);
Serial.print(" Serial Number: 0x");
Serial.println(slave.getSerialNumber(), HEX);
Serial.print(" Alias Address: ");
Serial.println(slave.getAliasAddress());
Serial.print(" Mailbox Protocol: 0x");
Serial.println(slave.getMailboxProtocol(), HEX);
Serial.print(" CoE Details: 0x");
Serial.println(slave.getCoEDetails(), HEX);
Serial.print(" FoE Details: 0x");
Serial.println(slave.getFoEDetails(), HEX);
Serial.print(" EoE Details: 0x");
Serial.println(slave.getEoEDetails(), HEX);
Serial.print(" SoE Channels: ");
Serial.println(slave.getSoEChannels());
Serial.print(" DC Supported: ");
Serial.println(slave.isSupportDC());
}
}
void loop() {
// put your main code here, to run repeatedly:
}3.2 SDO Upload/Download Examples
SDO Upload/Download Examples.
3.2.1 Example 1: SDO Upload using sdoUpload8()
The usage of sdoUpload16(), sdoUpload32(), and sdoUpload64() is similar to sdoUpload8(), except for the difference in the return value type.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
Serial.begin(115200);
master.begin();
device.attach(0, master);
Serial.print("1C12h.0 => ");
Serial.println(device.sdoUpload8(0x1C12, 0x00));
Serial.print("1C13h.0 => ");
Serial.println(device.sdoUpload8(0x1C13, 0x00));
// ...
}
void loop() {
// put your main code here, to run repeatedly:
}3.2.2 Example 2: SDO Upload using sdoUpload()
SDO Upload using sdoUpload().
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
Serial.begin(115200);
uint8_t value;
master.begin();
device.attach(0, master);
if (device.sdoUpload(0x1C12, 0x00, &value, sizeof(value)) >= 0) {
Serial.print("1C12h.0 => ");
Serial.println(value);
}
if (device.sdoUpload(0x1C13, 0x00, &value, sizeof(value)) >= 0) {
Serial.print("1C13h.0 => ");
Serial.println(value);
}
//...
}
void loop() {
// put your main code here, to run repeatedly:
}3.2.3 Example 3: SDO Upload using sdoUpload() with abort code
SDO Upload using sdoUpload() with abort code.
Initiate an SDO Upload command to read a value from a non-existent object, expecting an abort code of 0x06020000. For more information about abort codes, please refer to SDO Abort Code.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
Serial.begin(115200);
uint32_t abortcode;
uint8_t value;
master.begin();
device.attach(0, master);
if (device.sdoUpload(0xFFFF, 0xFF, &value, sizeof(value), &abortcode) == ECAT_ERR_DEVICE_COE_ERROR) {
Serial.print("Abort Code: 0x");
Serial.println(abortcode, HEX);
}
//...
}
void loop() {
// put your main code here, to run repeatedly:
}3.2.4 Example 4: SDO Download using sdoDownload8()
SDO Download using sdoDownload8().
The usage of sdoDownload16(), sdoDownload32(), and sdoDownload64() is similar to sdoDownload8(), except for the difference in the input parameter types.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
master.begin();
device.attach(0, master);
device.sdoDownload8(0x1C12, 0x00, 0);
device.sdoDownload8(0x1C13, 0x00, 0);
//...
}
void loop() {
// put your main code here, to run repeatedly:
}3.2.5 Example 5: SDO Download using sdoDownload()
SDO Download using sdoDownload().
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
uint8_t value;
master.begin();
device.attach(0, master);
value = 0;
device.sdoDownload(0x1C12, 0x00, &value, sizeof(value));
value = 0;
device.sdoDownload(0x1C13, 0x00, &value, sizeof(value));
//...
}
void loop() {
// put your main code here, to run repeatedly:
}3.2.6 Example 6: SDO Download using sdoDownload() with abort code
SDO Download using sdoDownload() with abort code.
Initiate an SDO Download command to write a value to a non-existent object, expecting an abort code of 0x06020000. For more information about abort codes, please refer to SDO Abort Code.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
Serial.begin(115200);
uint32_t abortcode;
uint8_t value = 0x01;
master.begin();
device.attach(0, master);
if (device.sdoDownload(0xFFFF, 0xFF, &value, sizeof(value), &abortcode) == ECAT_ERR_DEVICE_COE_ERROR) {
char buf[20];
sprintf(buf, "Abort Code: 0x%08lX", abortcode);
Serial.println(buf);
}
//...
}
void loop() {
// put your main code here, to run repeatedly:
}3.2.7 Example 7: Print the PDO mapping configuration
Print the PDO mapping configuration.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
Serial.begin(115200);
uint8_t assign_nr, mapping_nr;
uint16_t mapping;
uint32_t entry;
master.begin();
device.attach(0, master);
// RxPDO Mapping List
assign_nr = device.sdoUpload8(0x1C12, 0x00);
for (int m = 0; m < assign_nr; m++) {
mapping = device.sdoUpload16(0x1C12, m + 1);
Serial.print(" RxPDO");
Serial.print(m + 1);
Serial.print(" (");
Serial.print(mapping, HEX);
Serial.println("h)");
mapping_nr = device.sdoUpload8(mapping, 0x00);
for (int n = 0; n < mapping_nr; n++) {
entry = device.sdoUpload32(mapping, n + 1);
Serial.print(" ");
char entryBuf[11]; // "XXXXXXXXh" + null
sprintf(entryBuf, "%08lXh", entry);
Serial.println(entryBuf);
}
}
// TxPDO Mapping List
assign_nr = device.sdoUpload8(0x1C13, 0x00);
for (int m = 0; m < assign_nr; m++) {
mapping = device.sdoUpload16(0x1C13, m + 1);
Serial.print(" TxPDO");
Serial.print(m + 1);
Serial.print(" (");
Serial.print(mapping, HEX);
Serial.println("h)");
mapping_nr = device.sdoUpload8(mapping, 0x00);
for (int n = 0; n < mapping_nr; n++) {
entry = device.sdoUpload32(mapping, n + 1);
Serial.print(" ");
char entryBuf[11];
sprintf(entryBuf, "%08lXh", entry);
Serial.println(entryBuf);
}
}
//...
}
void loop() {
// put your main code here, to run repeatedly:
}3.2.8 Example 8: Change the PDO mapping configuration
Change the PDO mapping configuration.
Map the following objects to PDOs in a CiA 402 device that supports PDO mapping:
- Output PDO (RxPDO)
- Object 6040h: Controlword
- Object 607Ah: Target position
- Object 60FFh: Target velocity
- Object 6071h: Target torque
- Object 6060h: Modes of operation
- Input PDO (TxPDO)
- Object 6041h: Statusword
- Object 6064h: Position actual value
- Object 606Ch: Velocity actual value
- Object 6077h: Torque actual value
- Object 6061h: Modes of operation display
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
master.begin();
device.attach(0, master);
// 1C12
device.sdoDownload8(0x1C12, 0x00, 0);
device.sdoDownload8(0x1601, 0x00, 0);
device.sdoDownload32(0x1601, 0x01, 0x60400010);
device.sdoDownload32(0x1601, 0x02, 0x607A0020);
device.sdoDownload32(0x1601, 0x03, 0x60FF0020);
device.sdoDownload32(0x1601, 0x04, 0x60710010);
device.sdoDownload32(0x1601, 0x05, 0x60600008);
device.sdoDownload8(0x1601, 0x00, 5);
device.sdoDownload16(0x1C12, 0x1601, 1);
device.sdoDownload8(0x1C12, 0x00, 1);
// 1C13
device.sdoDownload8(0x1C13, 0x00, 0);
device.sdoDownload8(0x1A01, 0x00, 0);
device.sdoDownload32(0x1A01, 0x01, 0x60410010);
device.sdoDownload32(0x1A01, 0x02, 0x60640020);
device.sdoDownload32(0x1A01, 0x03, 0x606C0020);
device.sdoDownload32(0x1A01, 0x04, 0x60770010);
device.sdoDownload32(0x1A01, 0x05, 0x60610008);
device.sdoDownload8(0x1A01, 0x00, 5);
device.sdoDownload16(0x1C13, 0x1A01, 1);
device.sdoDownload8(0x1C13, 0x00, 1);
//...
}
void loop() {
// put your main code here, to run repeatedly:
}3.3 PDO Read/Write Examples
PDO Read/Write Examples.
3.3.1 Example 1: Read a bit data from Input PDO using pdoBitRead()
Read a bit from Input PDO using pdoBitRead().
A 16-channel digital input EtherCAT SubDevice has 2-byte Input PDOs, with each bit corresponding to a digital input channel. The states of channels 0 and 9 will be printed with a frequency of 1 Hz.

Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
Serial.begin(115200);
master.begin();
device.attach(0, master);
master.start();
}
void loop() {
// Read and display the state of PDO bits
Serial.print("Bit0 => ");
Serial.print(device.pdoBitRead(0)); // Read PDO bit 0
Serial.print(", Bit9 => ");
Serial.println(device.pdoBitRead(9)); // Read PDO bit 9
delay(1000);
}3.3.2 Example 2: Read a byte data from Input PDO using pdoRead8()
Read data from Input PDO using pdoRead8().
Same as example 1.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
Serial.begin(115200);
master.begin();
device.attach(0, master);
master.start();
}
void loop() {
// Read specific bits using pdoRead8 and print their values
Serial.print("Bit0 => ");
Serial.print((device.pdoRead8(0) >> 0) & 1);
Serial.print(", Bit9 => ");
Serial.println((device.pdoRead8(1) >> 1) & 1);
delay(1000);
}3.3.3 Example 3: Read data from Input PDO using pdoRead()
Read data from Input PDO using pdoRead().
Same as example 1.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
uint16_t value;
void setup() {
Serial.begin(115200);
master.begin();
device.attach(0, master);
master.start();
}
void loop() {
device.pdoRead(0, &value, sizeof(value));
Serial.print("Bit0 => ");
Serial.print((value >> 0) & 1);
Serial.print(", Bit9 => ");
Serial.println((value >> 9) & 1);
delay(1000);
}3.3.4 Example 4: Write a bit data to Output PDO using pdoBitWrite()
Write a bit to Output PDO using pdoBitWrite().
A 16-channel digital output EtherCAT SubDevice has 2-byte Output PDOs, with each bit corresponding to a digital output channel. Channels 0 and 9 will be toggled at a frequency of 1 Hz.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
master.begin();
device.attach(0, master);
master.start();
}
void loop() {
device.pdoBitWrite(0, 1);
device.pdoBitWrite(9, 1);
delay(1000);
device.pdoBitWrite(0, 0);
device.pdoBitWrite(9, 0);
delay(1000);
}3.3.5 Example 5: Write a byte data to Output PDO using pdoWrite8()
Write data to Output PDO using pdoWrite8().
Same as example 4.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
void setup() {
master.begin();
device.attach(0, master);
master.start();
}
void loop() {
device.pdoWrite8(0, 0x01);
device.pdoWrite8(1, 0x02);
delay(1000);
device.pdoWrite8(0, 0x00);
device.pdoWrite8(1, 0x00);
delay(1000);
}3.3.6 Example 6: Write data to Output PDO using pdoWrite()
Write data to Output PDO using pdoWrite().
Same as examples 4.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
uint16_t value;
void setup() {
master.begin();
device.attach(0, master);
master.start();
}
void loop() {
value = 0x0201;
device.pdoWrite(0, &value, sizeof(value));
delay(1000);
value = 0x0000;
device.pdoWrite(0, &value, sizeof(value));
delay(1000);
}3.4 Callback Examples
Callback Examples.
3.4.1 Example 1: Cyclic callback
A 16-channel digital output EtherCAT SubDevice has 2-byte Output PDOs, with each bit corresponding to a digital output channel. Channels 0 and 9 will be toggled at a frequency of 1 Hz.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
int toggle = 0;
int cycle_count = 0;
void MyCyclicCallback()
{
if (++cycle_count < 1000)
return;
cycle_count = 0;
toggle = !toggle;
device.pdoBitWrite(0, toggle);
device.pdoBitWrite(9, toggle);
}
void setup() {
Serial.begin(115200);
master.begin();
device.attach(0, master);
master.attachCyclicCallback(MyCyclicCallback);
master.start(1000000); // 1ms cycle
}
void loop() {
// put your main code here, to run repeatedly:
}3.4.2 Example 2: Cyclic callback with FPU-enabled
Cyclic callback with FPU-enabled.
If the callback function requires floating-point arithmetic, please use FPU-enabled callback function. For more detailed information, please refer to the function description below.
attachCyclicCallback()attachErrorCallback()attachEventCallback()
Here is the example code:
#include "Ethercat.h"
#define GRAVITY (9.80665)
EthercatMaster master;
EthercatDevice_Generic device;
int toggle = 0;
int cycle_count = 0;
double S = 0.0, T = 0.0;
double s = 0.0, t = 0.0;
void MyCyclicCallback()
{
S = (GRAVITY * T * T) / 2.0;
T += 0.001;
if (++cycle_count < 1000)
return;
cycle_count = 0;
toggle = !toggle;
device.pdoBitWrite(0, toggle);
device.pdoBitWrite(9, toggle);
}
void setup() {
Serial.begin(115200);
master.begin();
device.attach(0, master);
master.attachCyclicCallback(MyCyclicCallback, true);
master.start(1000000);
}
void loop() {
s = (GRAVITY * t * t) / 2.0;
t += 1.0;
Serial.print("S = ");
Serial.println(s, 6);
delay(1000);
}3.4.3 Example 3: Error callback
Print the count of each type of error once per second.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
// Error counters
int wkc_single_fault_cnt = 0;
int wkc_multiple_faults_cnt = 0;
int single_lost_frame_cnt = 0;
int multiple_lost_frames_cnt = 0;
int cable_broken_cnt = 0;
int wait_ack_timeout_cnt = 0;
// Error callback function
void myErroCallback(uint32_t errorcode) {
switch (errorcode) {
case ECAT_ERR_WKC_SINGLE_FAULT:
wkc_single_fault_cnt++;
break;
case ECAT_ERR_WKC_MULTIPLE_FAULTS:
wkc_multiple_faults_cnt++;
break;
case ECAT_ERR_SINGLE_LOST_FRAME:
single_lost_frame_cnt++;
break;
case ECAT_ERR_MULTIPLE_LOST_FRAMES:
multiple_lost_frames_cnt++;
break;
case ECAT_ERR_CABLE_BROKEN:
cable_broken_cnt++;
break;
case ECAT_ERR_WAIT_ACK_TIMEOUT:
wait_ack_timeout_cnt++;
break;
}
}
void setup() {
Serial.begin(115200);
master.attachErrorCallback(myErroCallback);
master.begin();
master.start();
}
void loop() {
Serial.print("ECAT_ERR_WKC_SINGLE_FAULT = ");
Serial.println(wkc_single_fault_cnt);
Serial.print("ECAT_ERR_WKC_MULTIPLE_FAULTS = ");
Serial.println(wkc_multiple_faults_cnt);
Serial.print("ECAT_ERR_SINGLE_LOST_FRAME = ");
Serial.println(single_lost_frame_cnt);
Serial.print("ECAT_ERR_MULTIPLE_LOST_FRAMES = ");
Serial.println(multiple_lost_frames_cnt);
Serial.print("ECAT_ERR_CABLE_BROKEN = ");
Serial.println(cable_broken_cnt);
Serial.print("ECAT_ERR_WAIT_ACK_TIMEOUT = ");
Serial.println(wait_ack_timeout_cnt);
delay(1000);
}3.4.4 Example 4: Event callback
Print the count of each type of event once per second.
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
// Event counters
int state_changed_cnt = 0;
int cable_reconnected_cnt = 0;
// Event callback function
void myEventCallback(uint32_t eventcode) {
switch (eventcode) {
case ECAT_EVT_STATE_CHANGED:
state_changed_cnt++;
break;
case ECAT_EVT_CABLE_RECONNECTED:
cable_reconnected_cnt++;
break;
}
}
void setup() {
Serial.begin(115200);
master.attachEventCallback(myEventCallback);
master.begin();
master.start();
}
void loop() {
Serial.print("ECAT_EVT_STATE_CHANGED = ");
Serial.println(state_changed_cnt);
Serial.print("ECAT_EVT_CABLE_RECONNECTED = ");
Serial.println(cable_reconnected_cnt);
delay(1000);
}3.5 DC Examples
DC Examples.
3.5.1 Example 1: Enable DC synchronization
Enable DC synchronization.
Implementing position control on a CiA 402 EtherCAT SubDevice using the EthercatDevice_Generic class. The CiA 402 control mode is set to cyclic synchronous position mode, and DC synchronization is enabled for precise timing.
The default PDO mapping is as follows:
- Output PDO (RxPDO)
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 |
| Controlword | Target Position | ||||
- Input PDO (TxPDO)
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 |
| Statusword | Position Actual Value | ||||
Here is the example code:
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic device;
uint32_t position = 0;
// Cyclic callback function, executed every 1ms
void MyCyclicCallback() {
// Check if the device is in "Operation Enable" state (0x27)
if ((device.pdoRead8(0) & 0x6F) != 0x27)
return;
// Increment target position by 1000 and write it to PDO
device.pdoWrite32(2, position += 1000);
}
void setup() {
Serial.begin(115200);
while (!Serial); // Wait for Serial to be ready
master.begin();
device.attach(0, master); // Attach slave device (slave ID 0)
device.setDc(1000000); // Enable Distributed Clock (1ms cycle)
device.sdoDownload8(0x6060, 0x00, 8); // Set mode of operation to CSP (mode 8)
// Register the cyclic callback function
master.attachCyclicCallback(MyCyclicCallback);
master.start(1000000, ECAT_SYNC); // Start EtherCAT master with 1ms sync cycle
// Read current position and set as initial target position
position = device.pdoRead32(2);
device.pdoWrite32(2, position);
// Transition through CiA 402 state machine to reach "Operation Enable"
device.pdoWrite8(0, 0x80); // Shutdown
delay(1000);
device.pdoWrite8(0, 0x06); // Switch On
delay(1000);
device.pdoWrite8(0, 0x07); // Enable Voltage
delay(1000);
device.pdoWrite8(0, 0x0F); // Operation Enable
delay(1000);
}
void loop() {
// put your main code here, to run repeatedly:
}Appendix
A.1 Error List
For most functions, a returned value less than zero indicates an error, and the value represents an error code. If there is an error code, you can find the error cause and corrective actions below.
Error List
| Definition | Code |
ECAT_SUCCESS | 0 |
ECAT_ERR_MODULE_INIT_FAIL | -100 |
ECAT_ERR_MODULE_GET_VERSION_FAIL | -101 |
ECAT_ERR_MODULE_VERSION_MISMATCH | -102 |
ECAT_ERR_MODULE_GENERIC_TRANSFER_INIT_FAIL | -103 |
ECAT_ERR_MASTER_DOWNLOAD_SETTINGS_FAIL | -200 |
ECAT_ERR_MASTER_SET_DEVICE_SETTINGS_FAIL | -201 |
ECAT_ERR_MASTER_GET_GROUP_INFO_FAIL | -202 |
ECAT_ERR_MASTER_GET_MASTER_INFO_FAIL | -203 |
ECAT_ERR_MASTER_GET_DEVICE_INFO_FAIL | -204 |
ECAT_ERR_MASTER_SET_GROUP_SETTINGS_FAIL | -205 |
ECAT_ERR_MASTER_MAPPING_INIT_FAIL | -206 |
ECAT_ERR_MASTER_INTERRUPT_INIT_FAIL | -207 |
ECAT_ERR_MASTER_ACTIVE_FAIL | -208 |
ECAT_ERR_MASTER_ENI_INITCMDS_FAIL | -209 |
ECAT_ERR_MASTER_NO_DEVICE | -210 |
ECAT_ERR_MASTER_ACYCLIC_INIT_FAIL | -300 |
ECAT_ERR_MASTER_ACYCLIC_REQUEST_FAIL | -301 |
ECAT_ERR_MASTER_ACYCLIC_BUSY | -302 |
ECAT_ERR_MASTER_ACYCLIC_TIMEOUT | -303 |
ECAT_ERR_MASTER_ACYCLIC_ERROR | -304 |
ECAT_ERR_MASTER_ACYCLIC_WRONG_STATUS | -405 |
ECAT_ERR_MASTER_GENERIC_SEND_FAIL | -400 |
ECAT_ERR_MASTER_GENERIC_RECV_FAIL | -401 |
ECAT_ERR_MASTER_NOT_BEGIN | -1000 |
ECAT_ERR_MASTER_WRONG_BUFFER_SIZE | -1001 |
ECAT_ERR_MASTER_REDUNDANCY_NO_DC | -1002 |
ECAT_ERR_MASTER_MEMORY_ALLOCATION_FAIL | -1003 |
ECAT_ERR_MASTER_OSLAYER_INIT_FAIL | -1004 |
ECAT_ERR_MASTER_NIC_INIT_FAIL | -1005 |
ECAT_ERR_MASTER_BASE_INIT_FAIL | -1006 |
ECAT_ERR_MASTER_CIA402_INIT_FAIL | -1007 |
ECAT_ERR_MASTER_SETUP_PDO_FAIL | -1008 |
ECAT_ERR_MASTER_SCAN_NETWORK_FAIL | -1009 |
ECAT_ERR_MASTER_START_MASTER_FAIL | -1010 |
ECAT_ERR_MASTER_CYCLETIME_TOO_SMALL | -1011 |
ECAT_ERR_MASTER_DUMP_OUTPUT_PDO_FAIL | -1012 |
ECAT_ERR_MASTER_CONFIG_DEVICE_FAIL | -1013 |
ECAT_ERR_MASTER_CONFIG_MAPPING_FAIL | -1014 |
ECAT_ERR_MASTER_WAIT_BUS_SYNC_TIMEOUT | -1015 |
ECAT_ERR_MASTER_WAIT_MASTER_SYNC_TIMEOUT | -1016 |
ECAT_ERR_MASTER_CYCLIC_START_FAIL | -1017 |
ECAT_ERR_MASTER_WRONG_BUFFER_POINTER | -1018 |
ECAT_ERR_MASTER_ENI_INIT_FAIL | -1050 |
ECAT_ERR_MASTER_ENI_MISMATCH | -1051 |
ECAT_ERR_MASTER_STOPPED | -1100 |
ECAT_ERR_MASTER_STARTED | -1101 |
ECAT_ERR_MASTER_NOT_IN_PREOP | -1102 |
ECAT_ERR_MASTER_NOT_IN_SAFEOP | -1103 |
ECAT_ERR_MASTER_NOT_IN_OP | -1104 |
ECAT_ERR_MASTER_II_TRANSITION_FAIL | -1200 |
ECAT_ERR_MASTER_IP_TRANSITION_FAIL | -1201 |
ECAT_ERR_MASTER_PS_TRANSITION_FAIL | -1202 |
ECAT_ERR_MASTER_SO_TRANSITION_FAIL | -1203 |
ECAT_ERR_DEVICE_NOT_EXIST | -2000 |
ECAT_ERR_DEVICE_NOT_ATTACH | -2001 |
ECAT_ERR_DEVICE_NO_MAILBOX | -2002 |
ECAT_ERR_DEVICE_NO_DC | -2003 |
ECAT_ERR_DEVICE_WRONG_INPUT | -2004 |
ECAT_ERR_DEVICE_MEMORY_ALLOCATION_FAIL | -2005 |
ECAT_ERR_DEVICE_VENDOR_ID_MISMATCH | -2006 |
ECAT_ERR_DEVICE_PRODUCT_CODE_MISMATCH | -2007 |
ECAT_ERR_DEVICE_NO_SUCH_FUNCTION | -2008 |
ECAT_ERR_DEVICE_FUNCTION_NOT_INIT | -2009 |
ECAT_ERR_DEVICE_BUSY | -2010 |
ECAT_ERR_DEVICE_TIMEOUT | -2011 |
ECAT_ERR_DEVICE_NO_DATA | -2012 |
ECAT_ERR_DEVICE_SII_READ_FAIL | -2100 |
ECAT_ERR_DEVICE_SII_WRITE_FAIL | -2101 |
ECAT_ERR_DEVICE_PDO_NOT_EXIST | -2200 |
ECAT_ERR_DEVICE_PDO_OUT_OF_RANGE | -2201 |
ECAT_ERR_DEVICE_FOE_NOT_SUPPORT | -2300 |
ECAT_ERR_DEVICE_FOE_REQUEST_FAIL | -2310 |
ECAT_ERR_DEVICE_FOE_TIMEOUT | -2311 |
ECAT_ERR_DEVICE_FOE_ERROR | -2312 |
ECAT_ERR_DEVICE_FOE_BUFFER_TOO_SMALL | -2313 |
ECAT_ERR_DEVICE_FOE_READ_FAIL | -2314 |
ECAT_ERR_DEVICE_FOE_WRITE_FAIL | -2315 |
ECAT_ERR_DEVICE_COE_SDO_NOT_SUPPORT | -2400 |
ECAT_ERR_DEVICE_COE_SDO_INFO_NOT_SUPPORT | -2401 |
ECAT_ERR_DEVICE_COE_BUSY | -2410 |
ECAT_ERR_DEVICE_COE_REQUEST_FAIL | -2411 |
ECAT_ERR_DEVICE_COE_TIMEOUT | -2412 |
ECAT_ERR_DEVICE_COE_ERROR | -2413 |
ECAT_ERR_DEVICE_CIA402_NOT_EXIST | -2500 |
ECAT_ERR_DEVICE_CIA402_ADD_FAIL | -2501 |
ECAT_ERR_DEVICE_CIA402_TYPE_MISMATCH | -2502 |
ECAT_ERR_DEVICE_CIA402_NO_MODE_SUPPORT | -2503 |
ECAT_ERR_DEVICE_CIA402_WRONG_MODE | -2504 |
ECAT_ERR_DEVICE_CIA402_MODE_NOT_SUPPORT | -2505 |
ECAT_ERR_DEVICE_CIA402_CHANGE_WRONG_STATE | -2506 |
ECAT_ERR_DEVICE_CIA402_WRITE_OBJECT_FAIL | -2507 |
ECAT_ERR_DEVICE_CIA402_NO_SUCH_TOUCH_PROBE | -2580 |
ECAT_ERR_DEVICE_CIA402_NO_SUCH_TOUCH_PROBE_SOURCE | -2581 |
ECAT_ERR_DEVICE_EOE_NOT_SUPPORT | -2600 |
ECAT_ERR_DEVICE_EOE_NO_SUCH_PORT | -2601 |
ECAT_ERR_DEVICE_EOE_TOO_MUCH_CONTENT | -2602 |
ECAT_ERR_DEVICE_EOE_BUSY | -2610 |
ECAT_ERR_DEVICE_EOE_REQUEST_FAIL | -2611 |
ECAT_ERR_DEVICE_EOE_TIMEOUT | -2612 |
ECAT_ERR_GROUP_WRONG_INPUT | -3000 |
ECAT_ERR_GROUP_NOT_ATTACH | -3001 |
A.2 Error Description and Corrective Actions
For Error Code Description and Corrective Actions.
A.3 Error Callback Code
Error Callback Code list:
ECAT_ERR_WKC_SINGLE_FAULT | Working Counter Fault. | 2000001 |
ECAT_ERR_WKC_MULTIPLE_FAULTS | Working Counter Multiple Faults. | 2000002 |
ECAT_ERR_SINGLE_LOST_FRAME | Single Lost Frame. | 2000003 |
ECAT_ERR_MULTIPLE_LOST_FRAMES | Multiple Lost Frames. | 2000004 |
ECAT_ERR_LOST_SLAVE | Lost SubDevice. | 2000005 |
ECAT_ERR_STATE_MISMATCH | State Mismatch. | 2000006 |
ECAT_ERR_CABLE_BROKEN | Cable Broken. | 2000007 |
ECAT_ERR_WAIT_ACK_TIMEOUT | Wait ACK Timeout. | 2001000 |
A.4 Event Callback Code
Event Callback Code list:
ECAT_EVT_STATE_CHANGED | State Changed. | 1000001 |
ECAT_EVT_CABLE_RECONNECTED | Cable Reconnected. | 1000002 |
A.5 SDO Abort Code
The CoE SDO Abort Codes defined in ETG.1000.6.
SDO Abort Code List:
| Value | Meaning |
| 0x05030000 | Toggle bit not changed. |
| 0x05040000 | SDO protocol timeout. |
| 0x05040001 | Client/Server command specifier not valid or unknown. |
| 0x05040005 | Out of memory. |
| 0x06010000 | Unsupported access to an object. |
| 0x06010001 | Attempt to read to a write only object. |
| 0x06010002 | Attempt to write to a read only object. |
| 0x06010003 | Subindex cannot be written, SI0 must be 0 for write access. |
| 0x06010004 | SDO Complete access not supported for objects of variable length such as ENUM object types. |
| 0x06010005 | Object length exceeds mailbox size. |
| 0x06010006 | Object mapped to RxPDO, SDO Download blocked. |
| 0x06020000 | The object does not exist in the object directory. |
| 0x06040041 | The object can not be mapped into the PDO. |
| 0x06040042 | The number and length of the objects to be mapped would exceed the PDO length. |
| 0x06040043 | General parameter incompatibility reason. |
| 0x06040047 | General internal incompatibility in the device. |
| 0x06060000 | Access failed due to a hardware error. |
| 0x06070010 | Data type does not match, length of service parameter does not match. |
| 0x06070012 | Data type does not match, length of service parameter too high. |
| 0x06070013 | Data type does not match, length of service parameter too low. |
| 0x06090011 | Subindex does not exist. |
| 0x06090030 | Value range of parameter exceeded (only for write access). |
| 0x06090031 | Value of parameter written too high. |
| 0x06090032 | Value of parameter written too low. |
| 0x06090036 | Maximum value is less than minimum value. |
| 0x08000000 | General error. |
| 0x08000020 | Data cannot be transferred or stored to the application. NOTE: This is the general Abort Code in case no further detail on the reason can determined. It is recommended to use one of the more detailed Abort Codes. (0x08000021, 0x08000022) |
| 0x08000021 | Data cannot be transferred or stored to the application because of local control. NOTE: “local control” means an application specific reason. It does not mean the ESM-specific control. |
| 0x08000022 | Data cannot be transferred or stored to the application because of the present device state. NOTE: “device state” means the ESM state. |
| 0x08000023 | Object dictionary dynamic generation fails or no object dictionary is present. |
A.6 Data Type
The Basic Data Types defined in ETG.1000.6:
Data Type List:
| Index (hex) | Object Type | Name |
| 0001 | DEFTYPE | BOOLEAN |
| 0002 | DEFTYPE | INTEGER8 |
| 0003 | DEFTYPE | INTEGER16 |
| 0004 | DEFTYPE | INTEGER32 |
| 0005 | DEFTYPE | UNSIGNED8 |
| 0006 | DEFTYPE | UNSIGNED16 |
| 0007 | DEFTYPE | UNSIGNED32 |
| 0008 | DEFTYPE | REAL32 |
| 0009 | DEFTYPE | VISIBLE_STRING |
| 000A | DEFTYPE | OCTET_STRING |
| 000B | DEFTYPE | UNICODE_STRING |
| 000C | DEFTYPE | TIME_OF_DAY |
| 000D | DEFTYPE | TIME_DIFFERENCE |
| 000F | DEFTYPE | DOMAIN |
| 0010 | DEFTYPE | INTEGER24 |
| 0011 | DEFTYPE | REAL64 |
| 0012 | DEFTYPE | INTEGER40 |
| 0013 | DEFTYPE | INTEGER48 |
| 0014 | DEFTYPE | INTEGER56 |
| 0015 | DEFTYPE | INTEGER64 |
| 0016 | DEFTYPE | UNSIGNED24 |
| 0018 | DEFTYPE | UNSIGNED40 |
| 0019 | DEFTYPE | UNSIGNED48 |
| 001A | DEFTYPE | UNSIGNED56 |
| 001B | DEFTYPE | UNSIGNED64 |
| 001D | DEFTYPE | GUID |
| 001E | DEFTYPE | BYTE |
| 002D | DEFTYPE | BITARR8 |
| 002E | DEFTYPE | BITARR16 |
| 002F | DEFTYPE | BITARR32 |
A.7 EtherCAT Network Information
More about the ENI
The EtherCAT Network Information (ENI) contains the necessary settings to configure an EtherCAT network. The XML-based file contains general information about the MDevice and the configurations of every SubDevice connected to the MDevice. The EtherCAT Configuration Tool reads the ESI files or online scans the network for all SubDevices, then user can configures relevant EtherCAT settings, such as PDO mapping and enabling DC, and then export the ENI file.

The EtherCAT Technology Group specifies that the EtherCAT MDevice Software must support at least one of the following in the Network Configuration section: Online Scanning or Reading ENI. This library, however, supports both. In the case of Reading ENI, this library currently extracts only partial information from the ENI file for network configuration.
The extracted information includes the following:
EtherCATConfig : Config : SubDevice : Info
- Elements
- VendorId
- ProductCode
- Attribute
- Identification : Value
- Purpose
Used to check whether the EtherCAT SubDevices on the network match the SubDevices specified in the ENI file. The checking rules are as follows:- Check if the number of SubDevices in the ENI file matches the number of SubDevices on the network.
- For SubDevices in the ENI file with the Identification: Value attribute, check if there are SubDevices on the network with matching Alias Address and Identification: Value attribute, as well as Vendor ID and Product Code. If such SubDevices exist, it indicates a successful match.
- For SubDevices with the Identification: Value attribute that fail to match, or those without this attribute, check if the Vendor ID and Product Code of the SubDevice with the same sequence number on the network match.
EtherCATConfig : Config : SubDevice : Mailbox
- Elements
- Send : MailboxSendInfoType : Start
- Recv : MailboxRecvInfoType : Start
- Purpose
Used to configure the mailbox Physical Start Address of an EtherCAT SubDevice.
EtherCATConfig : Config : SubDevice : Mailbox : CoE
- Elements
- InitCmds : InitCmd : Index
- InitCmds : InitCmd : SubIndex
- InitCmds : InitCmd : Data
- InitCmds : InitCmd : Timeout
- Attribute
- InitCmds : InitCmd : CompleteAccess
- Purpose
After switching the EtherCAT state machine to the Pre-Operational state, execute the CoE initialization commands for the EtherCAT SubDevice inEthercatMaster::begin().
EtherCATConfig : Config : SubDevice : ProcessData
- Elements
- Recv : BitLength
- Send : BitLength
- Purpose
The bit length of the output process data and input process data of an EtherCAT SubDevice is provided to the firmware for relevant configuration.
EtherCATConfig : Config : SubDevice : ProcessData : Sm
- Elements
- SyncManagerSettings : StartAddress
- SyncManagerSettings : ControlByte
- SyncManagerSettings : Enable
- Purpose
Used to configure the Sync Manager registers for the process data of an EtherCAT SubDevice.
EtherCATConfig : Config : SubDevice : DC
- Elements
- CycleTime0
- CycleTime1
- ShiftTime
- Purpose
Used to configure the DC parameters of an EtherCAT SubDevice.
The text of the 86Duino reference is a modification of the Arduino reference and is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.
For more info and sample requests, please write to info@icop.com.tw, call your nearest ICOP Branch, or contact our Worldwide Official Distributor.