[QEC Tutorial]
このガイドではEtherCAT Mデバイス QEC-M-01P とデジタルI/O SUBデバイスの使い方を説明します。 QEC-RXXDXX Series.
注記: QECのPoE(Power over Ethernet)
QEC 製品のインストールでは、ユーザーは PoE と非 PoE を簡単に区別できます。RJ45 コネクタのハウジングが赤い場合は PoE タイプ、黒い場合は非 PoE タイプです。
| Non-PoE type | PoE type |
|---|---|
 |  |
PoE(Power over Ethernet)は、ネットワーク経由で電力を供給する機能です。QECはオプションでPoE機能を搭載することで、配線を削減できます。実際には、システム機器に応じてPoEを選択しますので、評価およびテストの際には以下の点にご注意ください。
- QEC の PoE 機能は EtherCAT P と異なり、互換性がありません。QEC の PoE 機能は PoE タイプ B に基づいており、ピン機能は次のとおりです。

- PoE デバイスと非 PoE デバイスを接続する場合は、必ずピン 4、5、7、8 の Ethernet ケーブルを外してください (例: PoE 対応の QEC EtherCAT マスターをサードパーティの EtherCAT スレーブに接続する場合)。
- QEC の PoE 電源は最大 24V/3A です。
1. 接続および配線ハードウェア
ここでは以下のデバイスが使用されます。
- QEC-M-01P(EtherCAT Mデバイス/PoE)
- QEC-R11D88H-N (EtherCAT SUBデバイス 8-chデジタル入力、8-chデジタル出力/PoE)
- 24V 電源入力 & EUタイプターミナルケーブル
- 24V LED & LAN ケーブル

1.1 QEC-M-01P
PoE 機能を備えた QEC EtherCAT Mデバイス
- QEC-R11D88HのEtherCAT入力ポートにRJ45ケーブル(PoE電源)で接続されたEtherCAT出力ポート(上側)を使用する
- 24V 電源の場合は、EU 端子を介して Vs+/Vs- および Vp+/Vp- 電源に接続します。

1.2 QEC-R11D88H-N
- VP+ から DO 0+に接続
- 24V LED+をDO 0-に接続
- 24V LED- を VP-に接続

2. ソフトウェア開発環境: 86Duino IDE
86duino IDEをダウンロード https://www.qec.tw/software/.
ダウンロード後、ダウンロードしたzipファイルを解凍してください。追加のソフトウェアのインストールは不要です。86duino.exeをダブルクリックするだけでIDEが起動します。

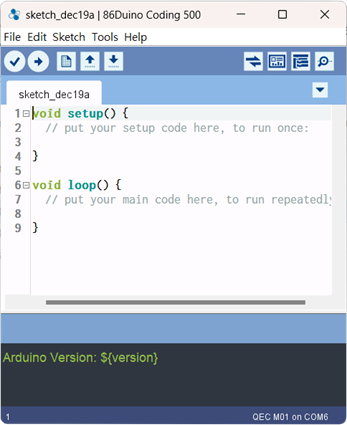
86Duino Coding IDE 500+ は以下のようになります。
3. PCに接続して環境を設定する
環境を設定するには、以下の手順に従います。
- Micro USB-USB ケーブル (86Duino IDE がインストールされている) を介して QEC-M-01P を PC に接続します。
- QECの電源をオンにします。
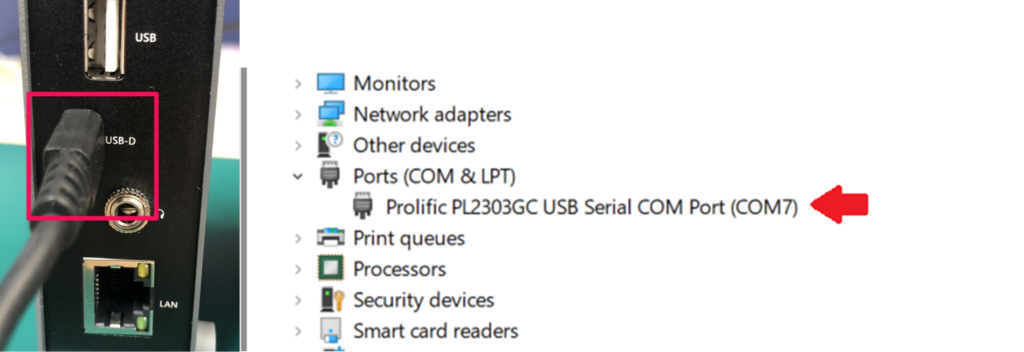
- PC で「デバイス マネージャー」(Win+X を押した後のメニューで選択)を開き、「ポート (COM と LPT)」を展開します。「Prolific PL2303GC USB シリアル COM ポート (COMx)」が検出されているはずです。検出されない場合は、必要なドライバーをインストールする必要があります。
(Windows PL2303ドライバはダウンロードできます。 ここ)
- 86Duino IDE を開きます。
- 適切なボードを選択します。IDE メニューで、[ツール] > [ボード] > [QEC-M-01] (または使用する QEC-M デバイス) を選択します。
- ポートの選択: IDE メニューで、[ツール] > [ポート] を選択し、QEC-M デバイスに接続する USB ポート (この場合は COM3 (QEC)) を選択します。

4. 86EVAによるコード記述
この例は、86Duino IDEのグラフィカルローコードプログラミングツールである86EVAとArduBlockを使用して、QEC-M(EtherCAT Mデバイス)およびQECのEtherCAT SUBデバイスデジタル入出力モジュールを操作する方法を示しています。デジタルピン0を4秒間Highにし、その後1秒間Lowにします。
ソフトウェアツールの説明:
- 86EVA (EVA, EtherCAT-Based Virtual Arduino):
これは、86Duino IDE の EtherCAT ライブラリに基づいたグラフィカル EtherCAT 構成ツールであり、86Duino の開発キットの 1 つです。
ステップ1:86EVAを立ち上げてスキャンする
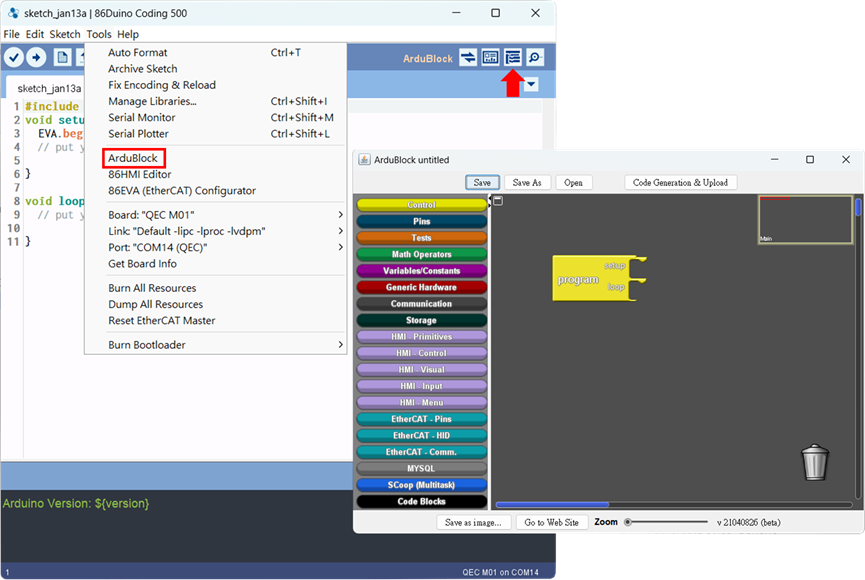
86EVA ツールは、次のボタンから開くことができます。

QEC-M-01P の正しい COM ポートが選択されていることを確認したら、[接続] ボタンを押して EtherCAT ネットワークのスキャンを開始します。

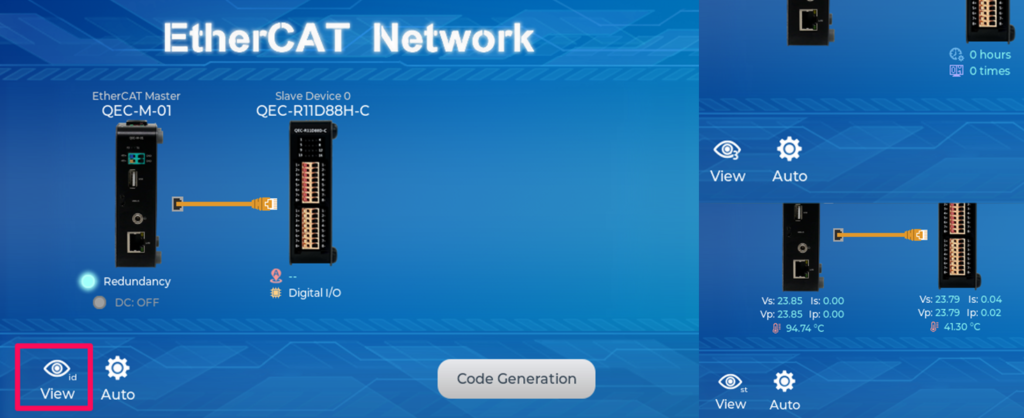
EtherCAT ネットワークがスキャンされた後、接続されているデバイスが表示されます。
左下隅の「表示」ボタンを押して、デバイスの状態を確認します。
ステップ2: パラメータを設定する
スキャンしたデバイスの画像を 2 回押すと、対応するパラメータ設定画面が表示されます。
QEC-M-01
QEC-M-01 の画像を 2 回押すと、パラメータ設定が表示されます。
初めて開発する場合は、まずプリセット設定を使用し、左上の「戻る」をクリックして戻ってください。

QEC-R11D88H-N
QEC-R11D88H の画像を 2 回押すと、パラメータ設定が表示されます。

「Digital Output Pin Mapping」エリアまで進みます。その中で、「デジタル出力ピンマッピング」のDQ00のドロップダウンボックスから「Virtual Pin D0」を選択します。その後左上の「Back」をクリックして戻ります。

この操作で、QEC-R11D88H のデジタル出力ピン 0 を EVA の仮想 D0 ピンに設定します。
ステップ3: コードを生成する
デバイスのパラメータを設定したら、ホーム画面に戻り、右下にある「コード生成」ボタンを押します。

完了したら、[OK] ボタンをダブルクリックして 86EVA をオフにします。または10 秒後に自動的に閉じます。

生成されたコードとファイルは次のとおりです。
- sketch_oct04a: メインプロジェクト (.ino、プロジェクト名によって異なります)
- ChatGPT.h: ChatGPTに渡すパラメータ
- myeva.cpp: 86EVAのC++プログラムコード
- myeva.h: 86EVAのヘッダーファイル

追加メモ: 86EVA がコードを生成した後、メイン プログラム (.ino) に次のコードが自動的に生成されます。これらのいずれかが欠落していると、86EVA は動作しません。
#include “myeva.h”: EVAヘッダーファイルをインクルードするEVA.begin()insetup();: EVA機能を初期化する
ステップ4:ArduBlockを起動してセットアップする
ArduBlock を開きます。
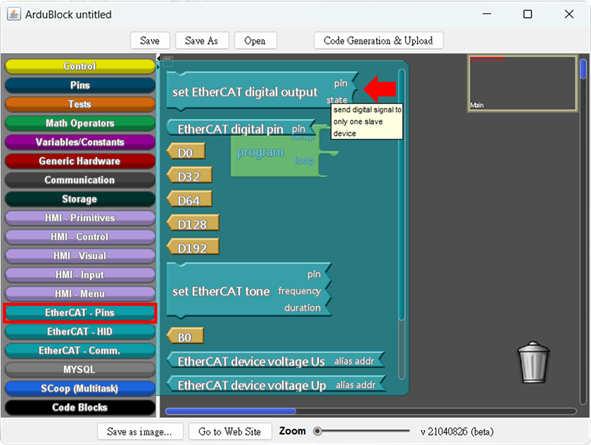
EtherCAT – Pins クラスから EtherCAT デジタル出力ブロックをプログラムのメイン ループに組み込み、ピンを D0 に、状態を HIGH に設定します
開いてから閉じるまでの間には、十分な点滅時間が必要なので、 delay() 4000 ミリ秒で点灯し、1000 ミリ秒で暗くなり、他の操作は実行しないコマンド。Control クラスで Millis (ミリ秒) ブロックを遅延します。
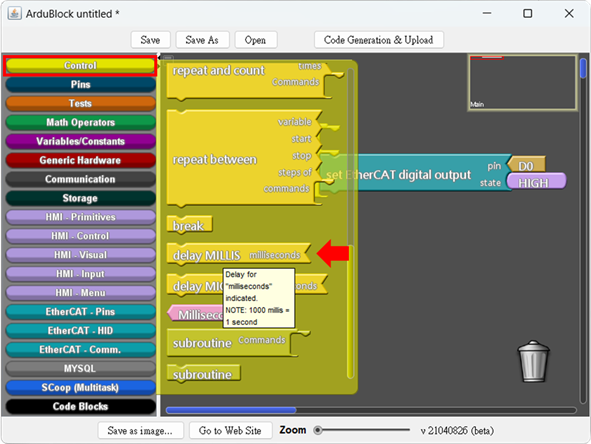
EtherCAT デジタル出力が High のブロックの下に遅延 Millis ブロックをドラッグし、時間を 4000 ミリ秒に設定し、その下に EtherCAT デジタル出力設定ブロックをドラッグして状態を LOW に設定します。最後に、遅延 Millis ブロックを最後までドラッグし、1000 ミリ秒に設定します。
この方法では、EtherCAT デジタル出力モジュールを使用して外部 LED を点滅させることができます。完成したブロックは次のようになります。

コードを生成してアップロードします。

アップロードが完了するとプログラムが実行され、LED が点滅し始めます。
5. トラブルシューティング
5.1 QEC-M-01はコードを正常にアップロードできない
コードのアップロードが正常に行えない場合は、86EVAを開いてQEC EtherCAT Mデバイスの環境に異常がないかご確認ください。下図のように、QEC EtherCAT Mデバイスの環境(ブートローダー、EtherCATファームウェア、EtherCATツールの3つを含む)を更新してみてください。

次に、アップデートの進め方についてさらに詳しく説明します。
ステップ1:QEC-Mのセットアップ
- 86Duino IDE 500(またはそれ以降のバージョン)をダウンロードしてインストールします。ダウンロードはこちらからできます。 ソフトウエア.
- QEC-M を接続する: USB ケーブルを使用して、QEC-M をコンピューターに接続します。
- 86Duino IDE を開く: インストールが完了したら、86Duino IDE ソフトウェアを開きます。
- ボードの選択: IDE メニューから、「ツール」>「ボード」>「QEC-M-01」(または使用している QEC-M の特定のモデル) を選択します。
- ポートの選択: IDE メニューから「ツール」>「ポート」を選択し、QEC-M が接続されている USB ポートを選択します。
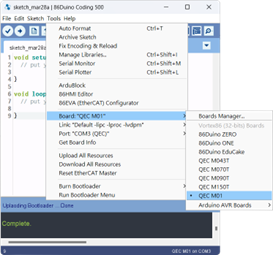
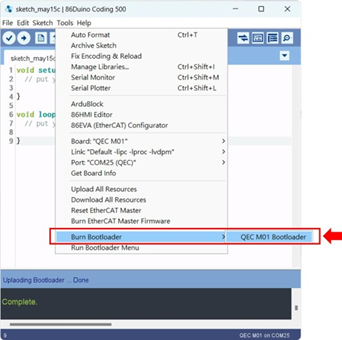
ステップ2:「ブートローダーの書き込み」ボタンをクリックする
QEC-M製品に接続後、「ツール」>「ブートローダーの書き込み」に進みます。現在選択されているQEC-Mの名前が表示されます。それをクリックするとアップデートプロセスが開始され、約5~20分かかります。
- QEC-M-01:
ステップ3: アップデートを完了する
上記の手順を完了すると、QEC-M は開発環境の最新バージョンに正常に更新されます。
詳しい情報やサンプルのご要望は、 info@qec.tw最寄りの ICOP branch、または当社までお問い合わせください official global distributor.