[Motion86]
描述
When setting the PPU (Pulse per Unit) using config_PPU, you can use the help calculation function to find the set parameters.
The relationship of PPU (Pulse per Unit) is shown in the following figure.
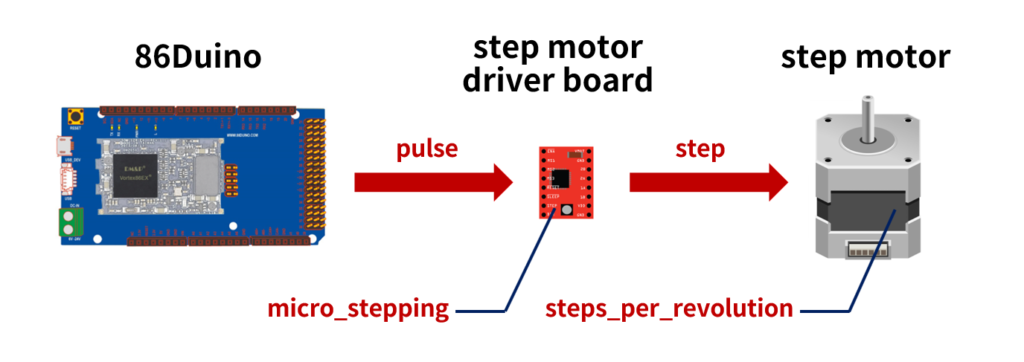
86Duino sends pulse to the stepper motor driver board, which sends step to rotate the stepper motor.
micro_stepping- The number of pulses received from the 86Duino to type a step on the stepper motor driver board.
steps_per_revolution- The parameter on the stepper motor, the number of steps to be received from the stepper motor driver board for one revolution.
The formula for calculating pulses_per_revolution is steps_per_revolution * micro_stepping.
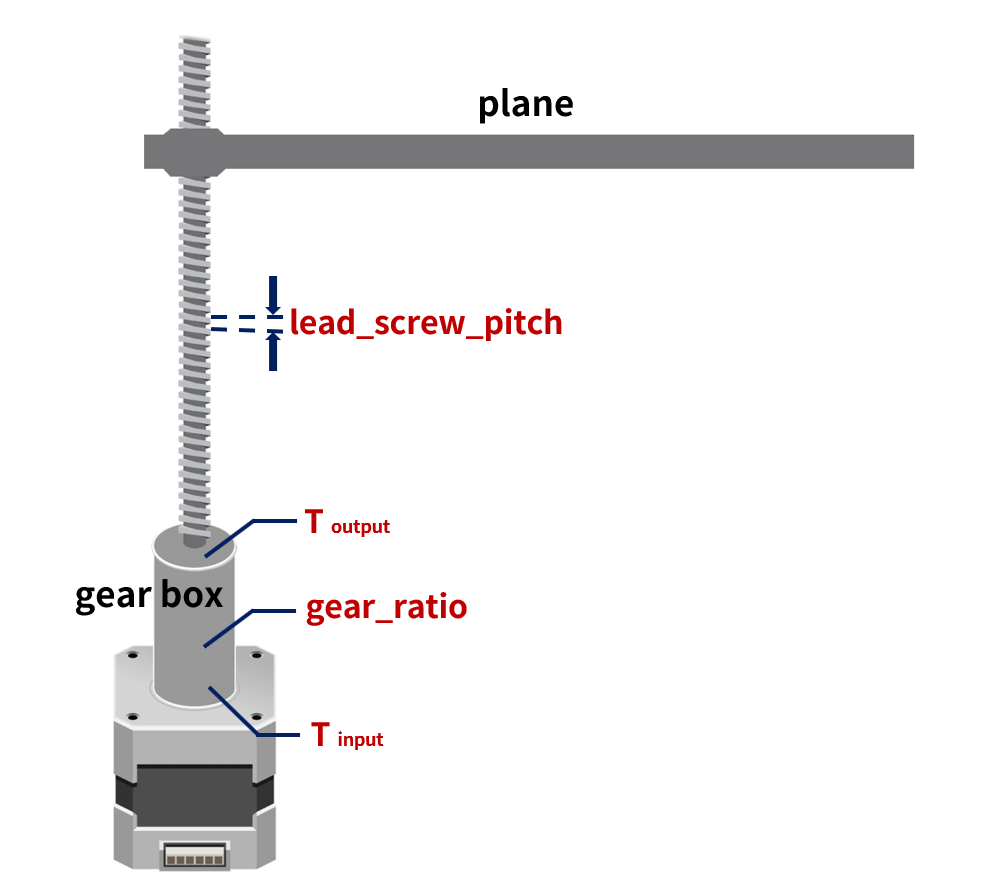
The parameters need to be measured in the ratio of the guide screw pitch to the gearbox gears, as follows.
語法
machine.computePPU_LeadScrew(pulses_per_revolution, leadscrew_pitch, gear_ratio);
參數
machine: for Machine objects.pulses_per_revolution: The number of pulses that the 86Duino needs to hit to make one revolution of the stepper motor.leadscrew_pitch: The pitch of the leadscrew.gear_ratio: Gear ratio of the gearbox. The value of gear_ratio is the number of output gear teeth / number of input gear teeth, i.e., gear_ratio = Toutput / Tinput.
回傳
double: The PPU (Pulse per Unit) after the return calculation.
參考
函式庫參考主頁面
86Duino 參考的文本是根據 知識共享署名-相同方式分享 3.0 許可證,部分文本是從 Arduino 參考 修改的。 參考中的代碼示例已發佈到公共領域。