[チュートリアル]
1. EK1814 および EK1100 + EL1889 + EL2889 クイックスタート
デジタル入出力(DI/DO)は産業オートメーションシステムの中核要素であり続けています。エンジニアの EtherCAT I/O 統合を簡素化するため、ICOP Technology は「QEC EtherCAT × Beckhoff DIO 開発ガイド」をリリースしました。QEC-M-01 EtherCAT MDevice を使用して Beckhoff DIO モジュールを制御する方法をデモンストレーションしています。

本ガイドは実際の実装に焦点を当て、配線からソフトウェア設定まで、エンジニアが EtherCAT ベースの DI/DO システムを迅速に評価・展開できるようにします。
1.1 対応する Beckhoff DIO 構成
本ガイドは、広く使用されている 2 種類の Beckhoff EtherCAT DIO アーキテクチャを対象としています:
- EK1814 — 統合型 EtherCAT DI/DO カプラー
EtherCAT カプラーと DI/DO チャンネルを 1 つのモジュールに統合したコンパクトなソリューション。小規模システムや迅速な検証に最適です。 - EK1100 + EL1889 + EL2889 — モジュラー I/O システム
独立した DI および DO ターミナルを使用する柔軟でスケーラブルなアーキテクチャ。より多くの I/O 数や将来の拡張が必要なアプリケーションに適しています。
1.2 配線から制御まで
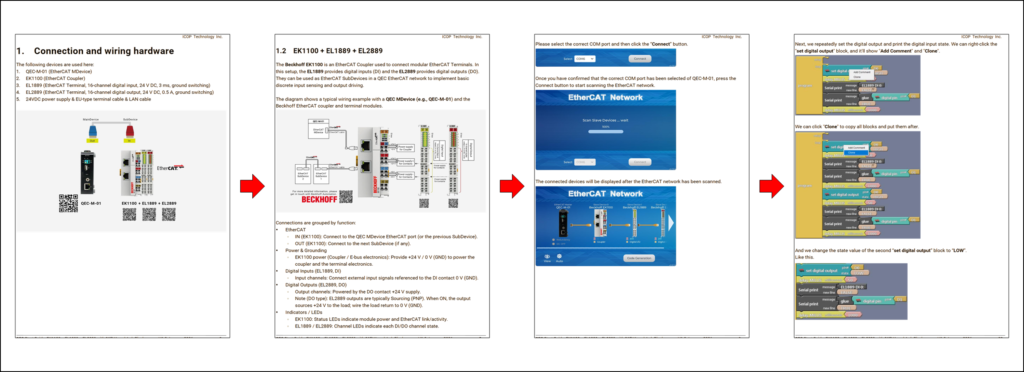
ステップバイステップの手順でユーザーをガイドします:
- QEC-M-01 を使用した EtherCAT ネットワーク配線
- DI/DO チャンネルの電源供給とアース
- PNP(ソーシング)DO の特性と配線上の注意事項
- ステータス LED とチャンネルインジケーター
- QEC PoE および非 PoE 使用時の考慮事項
EtherCAT を初めて使用するユーザーでも効率的にセットアップを完了できます。
2. 柔軟な開発オプション
本ガイドでは、QEC ソフトウェアエコシステムを使用した複数の開発アプローチをデモンストレーションしています:
- 86Duino IDE (C/C++) による直接 EtherCAT I/O 制御
- 86EVA によるグラフィカル EtherCAT 設定と自動コード生成
- 86EVA + ArduBlock によるローコード・ブロックベースの DI/DO 制御
この柔軟性により、同一のハードウェアプラットフォーム上での迅速な評価と本番レベルの開発の両方をサポートします。
2.1 コードの記述
以下のプログラムは次の設定を行います:
- EtherCAT サイクルタイム:3 ミリ秒(DI/DO フィルターによって異なります)。
- EtherCAT モード: ECAT_SYNC。
サイクルタイムはモジュールのフィルターとアプリケーションのニーズによって異なります(例:スタートガイドでは 3 ms または 4 ms)。
これ EthercatMaster オブジェクト("master") は QEC MDevice: QEC-M-01.
これ EthercatDevice_Generic オブジェクトは Beckhoff ターミナルを表します: EK1100 (“ek1100")・ EL1889 (“el1889")・ EL2889 (“el2889")。このセクションでは EL2889 DO0 (HIGH/LOW)し、短い安定待機後に EL1889 DI0 を読み取って出力変化が入力状態に反映されていることを確認します(例:DO0 と DI0 間の外部ループバック配線、または DI0 への外部信号入力を使用)。
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_Generic ek1100;
EthercatDevice_Generic el1889;
EthercatDevice_Generic el2889;
void setup() {
Serial.begin(115200);
Serial.print("Begin: "); Serial.println(master.begin());
Serial.print("EK1100: "); Serial.println(ek1100.attach(0, master));
Serial.print("EL1889: "); Serial.println(el1889.attach(1, master));
Serial.print("EL2889: "); Serial.println(el2889.attach(2, master));
Serial.print("Start: ");
Serial.println(master.start(3000000, ECAT_SYNC));
}
void loop() {
el2889.pdoBitWrite(0, HIGH);
delay(50);
Serial.print("EL1889 DI 0: ");
Serial.println(el1889.pdoBitRead(0));
delay(1000);
el2889.pdoBitWrite(0, LOW);
delay(50);
Serial.print("EL1889 DI 0: ");
Serial.println(el1889.pdoBitRead(0));
delay(1000);
}さらに詳しく知りたい場合は、以下のリンクをクリックして完全なガイドをご覧ください。
- EK1100(カプラー)+ EL1889(16 DI)+ EL2889(16 DO)
- EK1814(カプラー + DIO)
QEC EtherCAT MDevice と Beckhoff DIO モジュールを組み合わせることで、エンジニアは特定のベンダーエコシステムや複雑な設定ワークフローに縛られることなく、安定したスケーラブルな EtherCAT I/O システムを構築できます。
詳細情報やサンプルのご要望については、info@icop.com.tw までメールをお送りいただくか、最寄りの ICOP 支店 までお電話いただくか、ワールドワイド正規販売代理店までお問い合わせください。