[QEC Tutorial]
このガイドではEtherCAT Mデバイス QEC-M-01P とデジタルI/O SUBデバイスの使い方を説明します。 QEC-RXXDXX Series.
注記: QECのPoE(Power over Ethernet)
QEC 製品のインストールでは、ユーザーは PoE と非 PoE を簡単に区別できます。RJ45 コネクタのハウジングが赤い場合は PoE タイプ、黒い場合は非 PoE タイプです。
| Non-PoE type | PoE type |
|---|---|
 |  |
PoE(Power over Ethernet)は、ネットワーク経由で電力を供給する機能です。QECはオプションでPoE機能を搭載することで、配線を削減できます。実際には、システム機器に応じてPoEを選択しますので、評価およびテストの際には以下の点にご注意ください。
- QEC の PoE 機能は EtherCAT P と異なり、互換性がありません。QEC の PoE 機能は PoE タイプ B に基づいており、ピン機能は次のとおりです。

- PoE デバイスと非 PoE デバイスを接続する場合は、必ずピン 4、5、7、8 の Ethernet ケーブルを外してください (例: PoE 対応の QEC EtherCAT マスターをサードパーティの EtherCAT スレーブに接続する場合)。
- QEC の PoE 電源は最大 24V/3A です。

1. 接続および配線ハードウェア
ここでは以下のデバイスが使用されます。
- QEC-M-01P (EtherCAT Mデバイス/PoE)
- QEC-R11D88H-N (EtherCAT SUBデバイス 8-chデジタル入力、8-chデジタル出力/PoE)
- 24V入力電源
- 24V仕様LED

1.1 QEC-M-01P
PoE 機能を備えた QEC EtherCAT Mデバイス
- QEC-R11D88HのEtherCAT入力ポートにRJ45ケーブル(PoE電源)で接続されたEtherCAT出力ポート(上側)を使用する
- 24V 電源の場合は、EU 端子を介して Vs+/Vs- および Vp+/Vp- 電源に接続します。

1.2 QEC-R11D88H-N
- VP+からブレッドボード+に接続し、VP-からブレッドボード-に接続します。
- ブレッドボード + からボタンに接続し、ボタンから DI 0+ に接続し、DI 0- からブレッドボード - に接続します。
- ブレッドボード+からDO 0+に接続します。
- 24V LED+をDO 0-に接続します。
- 24V LEDをブレッドボードに接続します。
1.3 Wiring Diagram

2. ソフトウェア/開発環境: 86Duino IDE
86duino IDEをダウンロード https://www.qec.tw/software/.

ダウンロード後、ダウンロードしたzipファイルを解凍してください。追加のソフトウェアのインストールは不要です。86duino.exeをダブルクリックするだけでIDEが起動します。

86Duino Coding IDE 500+ は以下のようになります。

3. PCに接続して環境を設定する
環境を設定するには、以下の手順に従います。
- Micro USB-USB ケーブル (86Duino IDE がインストールされている) を介して QEC-M-01P を PC に接続します。
- QECの電源をオンにします。
- PC で「デバイス マネージャー」(Win+X を押した後のメニューで選択)を開き、「ポート (COM と LPT)」を展開します。「Prolific PL2303GC USB シリアル COM ポート (COMx)」が検出されているはずです。検出されない場合は、必要なドライバーをインストールする必要があります。
(Windows PL2303ドライバはダウンロードできます。 ここ)

- 86Duino IDE を開きます。
- 適切なボードを選択します。IDE メニューで、[ツール] > [ボード] > [QEC-M-01] (または使用する QEC-M デバイス) を選択します。
- ポートの選択: IDE メニューで、[ツール] > [ポート] を選択し、QEC-M デバイスに接続する USB ポート (この場合は COM3 (QEC)) を選択します。

4. 86EVAによるコード記述
これは、86Duino IDE の EtherCAT ライブラリに基づいたグラフィカル EtherCAT 構成ツールであり、86Duino の開発キットの 1 つです。ユーザーはこれを使用して、EtherCAT ネットワークを迅速に構成し、プログラミングを開始できます。
この例は、デジタル入力のピン0を読み取り、その状態を判断します。HIGHの場合はデジタル出力のピン0をHIGHに設定します。LOWの場合はデジタル出力のピン0をLOWに設定します。DIのピン0には外部ボタンを、DOのピン0には外部24V LEDを接続します。
ステップ1:86EVAを立ち上げてスキャンする
86EVA ツールは、次のボタンから開くことができます。

QEC-M-01P の正しい COM ポートが選択されていることを確認したら、[接続] ボタンを押して EtherCAT ネットワークのスキャンを開始します。

EtherCAT ネットワークがスキャンされた後、接続されているデバイスが表示されます。
左下隅の「表示」ボタンを押して、デバイスの状態を確認します。

ステップ2: パラメータを設定する
スキャンしたデバイスの画像を 2 回押すと、対応するパラメータ設定画面が表示されます。
QEC-M-01
QEC-M-01 の画像を 2 回押すと、パラメータ設定が表示されます。
初めて開発する場合は、まずプリセット設定を使用し、左上の「戻る」をクリックして戻ってください。

QEC-R11D88H-N
QEC-R11D88H の画像を 2 回押すと、パラメータ設定が表示されます。

「デジタル入力ピンマッピング」エリアに移動します。その中で、「デジタル入力ピンマッピング」のDI00のドロップダウンボックスから「仮想ピンD0」を選択します。

「デジタル出力ピンマッピング」エリアまで進みます。その中で、「デジタル出力ピンマッピング」のDQ00のドロップダウンボックスから「仮想ピンD1」を選択します。

終了したら、左上の「戻る」をクリックして戻ります。

これらのアクションは、QEC-R11D88H のデジタル入力ピン 0 を EVA の仮想 D0 ピンに設定し、デジタル出力ピン 0 を EVA の仮想 D1 ピンに設定します。
ステップ3: コードを生成する
デバイスのパラメータを設定したら、ホーム画面に戻り、右下にある「コード生成」ボタンを押します。

完了したら、[OK] ボタンをダブルクリックして 86EVA をオフにします。または10 秒後に自動的に閉じます。

生成されたコードとファイルは次のとおりです。
- sketch_oct04a: メインプロジェクト (.ino、プロジェクト名によって異なります)
- ChatGPT.h: ChatGPTに渡すパラメータ
- myeva.cpp: 86EVAのC++プログラムコード
- myeva.h: 86EVAのヘッダーファイル

追加メモ: 86EVA がコードを生成した後、メイン プログラム (.ino) に次のコードが自動的に生成されます。これらのいずれかが欠落していると、86EVA は動作しません。
#include “myeva.h”: EVAヘッダーファイルをインクルードするEVA.begin();insetup(): EVA機能を初期化する
Step 4: Write the code
この例は、デジタル入力のピン0を読み取り、その状態を判断します。HIGHの場合はデジタル出力のピン0をHIGHに設定します。LOWの場合はデジタル出力のピン0をLOWに設定します。DIのピン0には外部ボタンを、DOのピン0には外部24V LEDを接続します。
#include "myeva.h"
void setup() {
EVA.begin(); // Initialize EVA function.
}
void loop() {
// Check the status of EVA D0 of the slave device
if (EVA.digitalRead(0) == HIGH) {
// If EVA D0 is HIGH, set EVA D1 to HIGH
EVA.digitalWrite(1, HIGH);
} else if (EVA.digitalRead(0) == LOW) {
// If EVA D0 is LOW, set EVA D1 to LOW
EVA.digitalWrite(1, LOW);
}
}注記: コードが書き終わったら、ツールバーのこちらをクリックして ![]() コンパイルを行い、エラーがないことを確認しこのボタンで
コンパイルを行い、エラーがないことを確認しこのボタンで ![]() アップロードを行います。アップロードがが完了するとプログラムが実行され、LED が点滅し始めます。
アップロードを行います。アップロードがが完了するとプログラムが実行され、LED が点滅し始めます。

Finished look.

5. トラブルシューティング
5.1 QEC-M-01はコードを正常にアップロードできない
コードのアップロードが正常に行えない場合は、86EVAを開いてQEC EtherCAT Mデバイスの環境に異常がないかご確認ください。下図のように、QEC EtherCAT Mデバイスの環境(ブートローダー、EtherCATファームウェア、EtherCATツールの3つを含む)を更新してみてください。

次に、アップデートの進め方についてさらに詳しく説明します。
ステップ1:QEC-Mのセットアップ
- 86Duino IDE 500(またはそれ以降のバージョン)をダウンロードしてインストールします。ダウンロードはこちらからできます。 ソフトウエア.
- QEC-M を接続する: USB ケーブルを使用して、QEC-M をコンピューターに接続します。
- 86Duino IDE を開く: インストールが完了したら、86Duino IDE ソフトウェアを開きます。
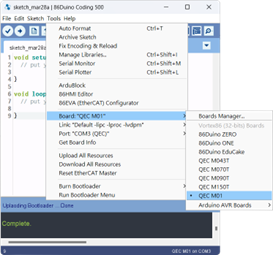
- ボードの選択: IDE メニューから、「ツール」>「ボード」>「QEC-M-01」(または使用している QEC-M の特定のモデル) を選択します。
- ポートの選択: IDE メニューから「ツール」>「ポート」を選択し、QEC-M が接続されている USB ポートを選択します。
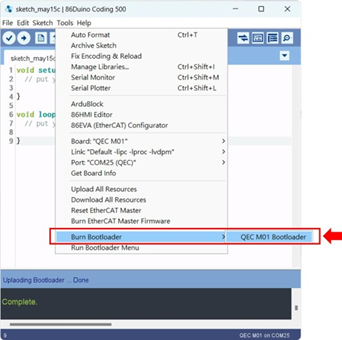
ステップ2:「ブートローダーの書き込み」ボタンをクリックする
QEC-M製品に接続後、「ツール」>「ブートローダーの書き込み」に進みます。現在選択されているQEC-Mの名前が表示されます。それをクリックするとアップデートプロセスが開始され、約5~20分かかります。
- QEC-M-01:
ステップ3: アップデートを完了する
上記の手順を完了すると、QEC-M は開発環境の最新バージョンに正常に更新されます。
詳しい情報やサンプルのご要望は、 info@qec.tw最寄りの ICOP branch、または当社までお問い合わせください official global distributor.