[チュートリアル]
エンジニアやシステム インテグレーターが QEC-M-01 (EtherCAT Mデバイス) を QEC-RXXD シリーズ (EtherCAT デジタル I/O モジュール) と組み合わせて自動化制御に活用できるように、新しいテクニカル スタート ガイドを公開しました。

これらのガイドには、EtherCAT セットアップのワークフロー、実用的なコーディング例、グラフィカル ツールの統合のヒントが段階的に記載されており、試運転を迅速化し、エンジニアリング時間を短縮できます。
1. システムの概要
1.1 QEC Mデバイスとは
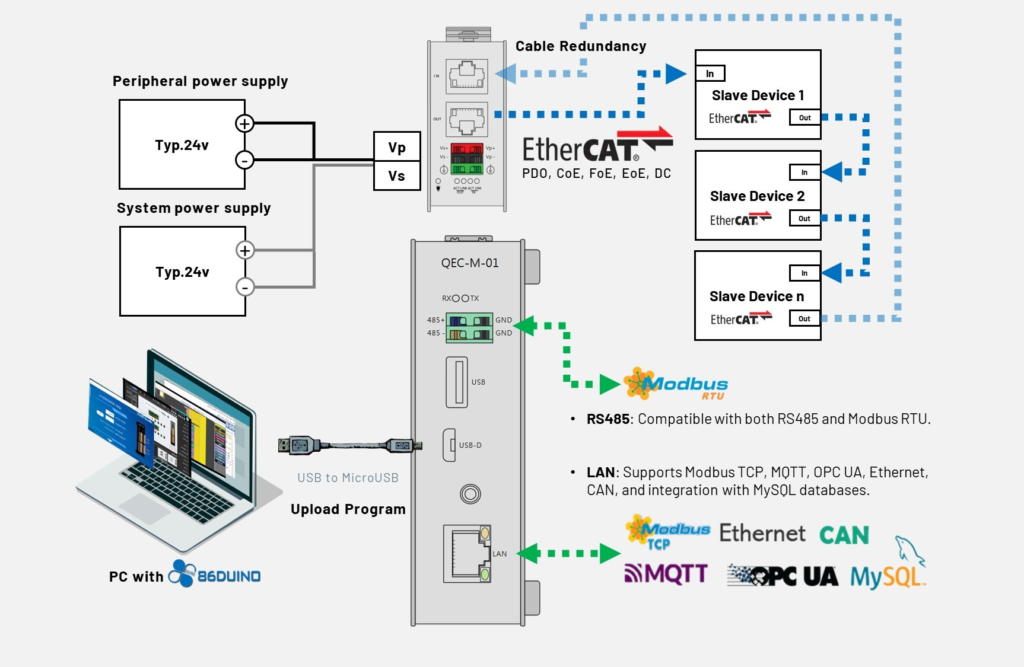
QEC-M-01は、確定的な制御と迅速な統合を実現するために設計された、コンパクトで高性能なEtherCAT MDeviceです。オープンソースの86Duino IDEを搭載し、リアルタイム・マルチタスク・アーキテクチャと統合ツールを備え、オートメーションエンジニアにとって使い慣れた開発環境を提供します。
EtherCAT PDO マッピング/転送を使用すると、QEC-M-01 は一定のサイクルで QEC-RXXD モジュールと DI/DO データを交換して、応答性と繰り返し性に優れた I/O 制御を実現できます。
1.2 QEC-RXXDシリーズの利点
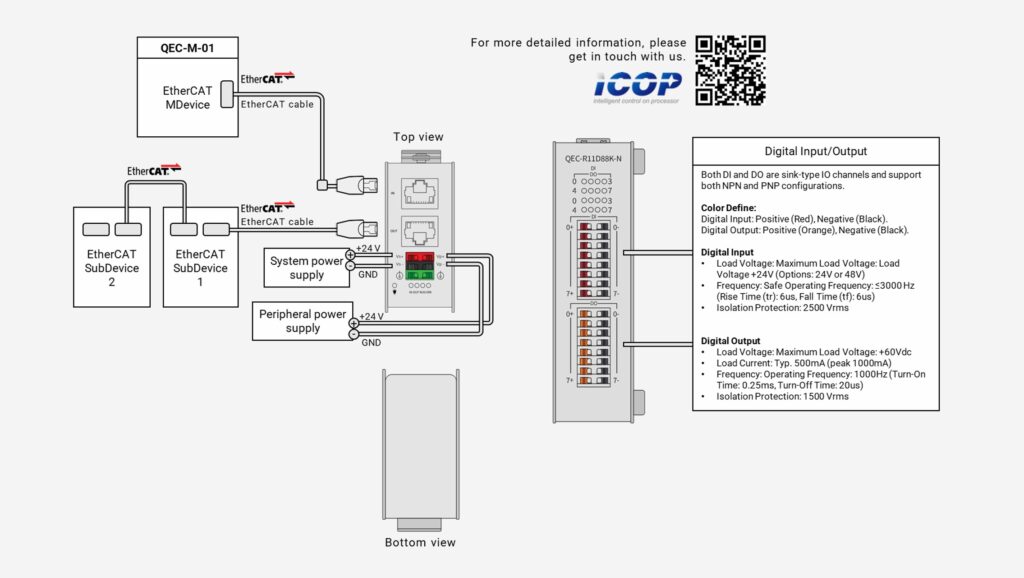
QEC-RXXDモジュールは、NPNとPNP配線の両方をサポートするデジタル入出力(DI/DO)チャンネルを提供します。最大16個の独立したデジタルチャンネルを備え、EtherCATの分散クロック(DC)をサポートすることで、ノード間の正確な同期を実現します。サイクルタイムはネットワークとデバイスの構成によって異なります(一般的なシステムは1ミリ秒から始まり、そこから最適化されます)。
2. スタートガイドのメリット(得られるもの)
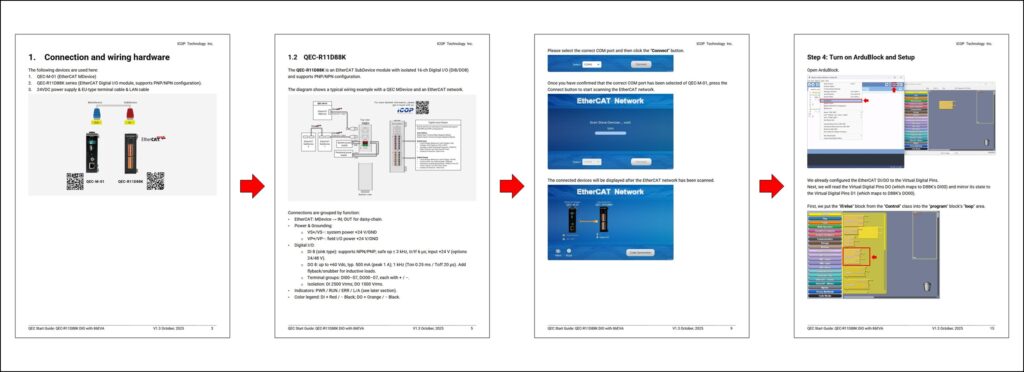
- ステップバイステップのセットアップガイド
配線、EtherCAT ネットワークの起動、推奨パラメータ チェックリスト。 - プログラミング例
実用的なコード スニペットと制御フローの例により、I/O 制御 を迅速に実装できます。 - 統合のヒントとトラブルシューティング
一般的なフィールドの問題に関するメモとグラフィカル ツールの統合のヒント。
2.1 コードの記述
以下のプログラムは次の設定を行います:
- EtherCAT サイクル時間: 1 ミリ秒。
- EtherCAT モード: ECAT_SYNC。
これ EthercatMaster オブジェクト("master”) represents the QEC-M-01, while the EthercatDevice_QECR11D88K オブジェクト("slave0”) represents the QEC-R11D88K module.
このセクションでは、デジタル入力 DI00 (ボタンなど) を読み取り、その状態をデジタル出力 DO00 (LED/負荷など) にミラーリングします。
サンプルコードは次のとおりです。
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_QECR11D88K slave0;
void setup() {
Serial.begin(115200);
Serial.print("Begin: ");
Serial.println(master.begin());
Serial.print("Slave: ");
Serial.println(slave0.attach(0, master));
Serial.print("Start: ");
Serial.println(master.start(1000000, ECAT_SYNC));
}
void loop() {
if (slave0.digitalRead(0) == HIGH)
slave0.digitalWrite(0, HIGH);
else
slave0.digitalWrite(0, LOW);
}さらに詳しく知りたい場合は、以下のリンクをクリックして完全なガイドをご覧ください。
したがって、高速で信頼性の高いデジタル I/O を必要とする EtherCAT オートメーション システムを構築する場合、QEC-M-01 を QEC-RXXD シリーズと組み合わせると、PDO ベースの周期的データ交換を通じて実用的で確定的なソリューションが提供されます。
詳細情報やサンプルのご要望については、info@icop.com.tw までメールをお送りいただくか、最寄りの ICOP 支店 までお電話いただくか、ワールドワイド正規販売代理店までお問い合わせください。