86Diuno IDE 從 Coding 318 版開始加入此函式庫,利用此函式庫能讓 86Duino 成為一個簡單的多軸運動控制器 (Motion controller)。運動控制 (Motion control) 是自動化技術的一部份,產業自動化可以提升生產速度、降低生產成本、改善生產品質、增強市場競爭力,所以運動控制常被運用在包裝、印刷、紡織、半導體器件製造及生產線。
Motion86 函式庫使 86Duino 成為一個易於開發的運動控制器,具有適用於自動化應用的 Arduino 友善功能,從而加快了控制器開發並降低了開發成本。
Motion86 函式庫的主要功能如下:
- 最多 9 軸步進和伺服馬達運動控制,脈衝輸出頻率高達 10MHz。
- 最多 3 個獨立軸組。
- 支援 G 代碼。
- 多軸線性、圓弧和螺旋插補,0.5ms 精細插補週期。
- 支援 JOG 功能。
- 支援手輪 (MPG)。
- 速度預讀程式可預讀 1024 個會話。
- 進給率倍率,可立即回應。
- 軸跟隨功能,帶電子齒輪比設定。
接線說明和範例
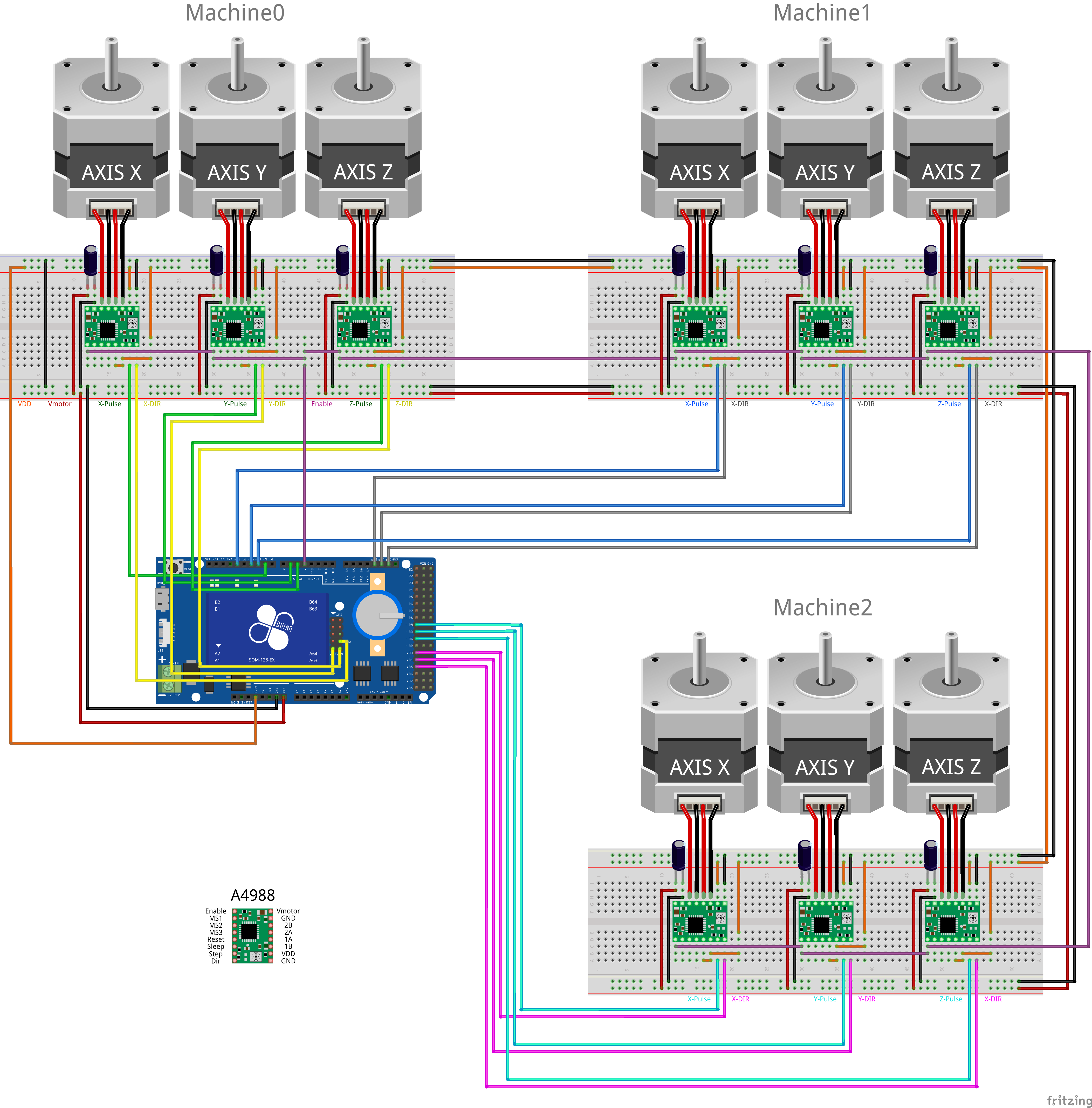
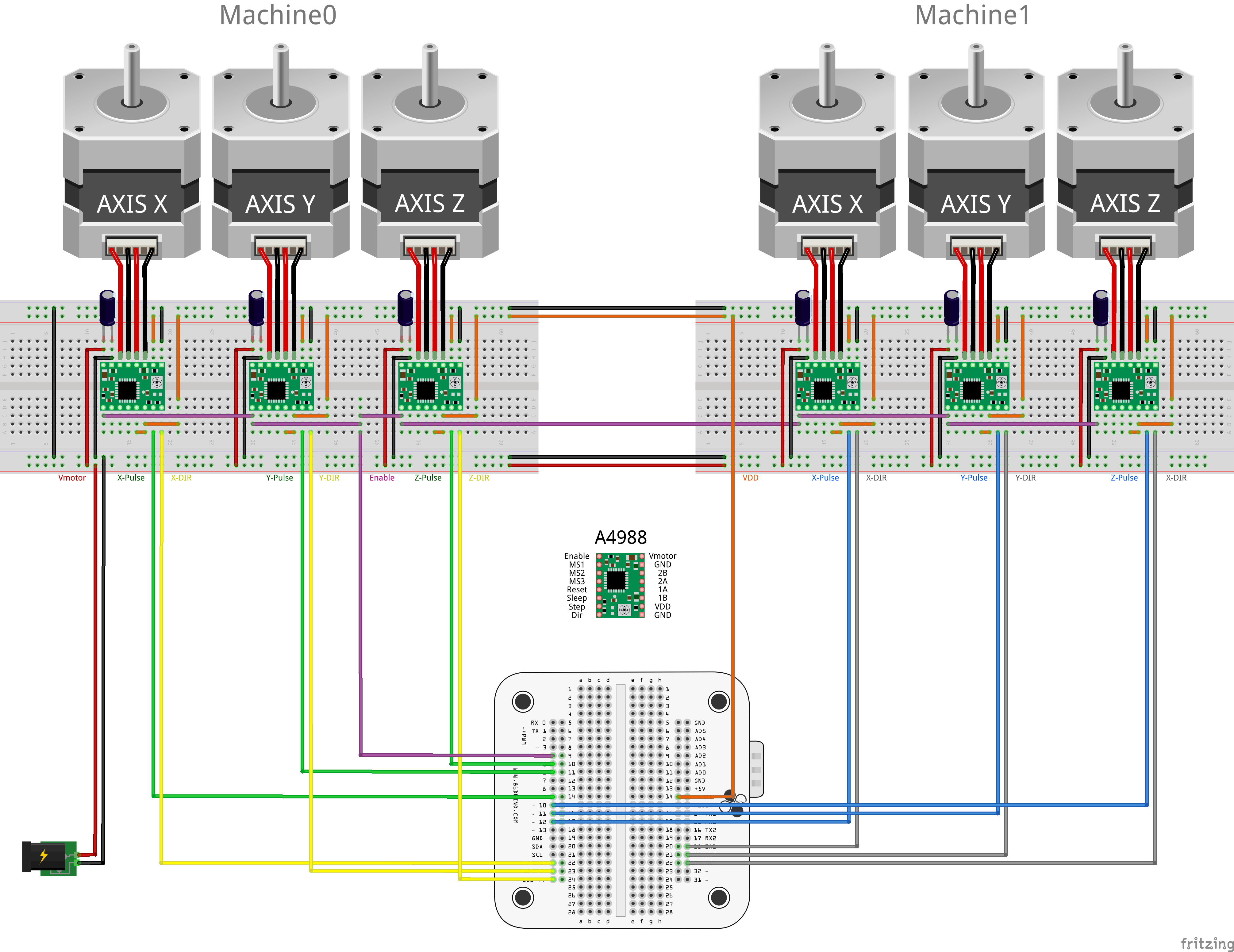
Motion86 函式庫最多支援 Machine0、Machine1、Machine2 三個軸群,每個軸群可連接控制一台 XYZ 三軸直角坐標系機器 ── 例如 SABLE CNC 工作室 出品的三軸 CNC 雕刻機。
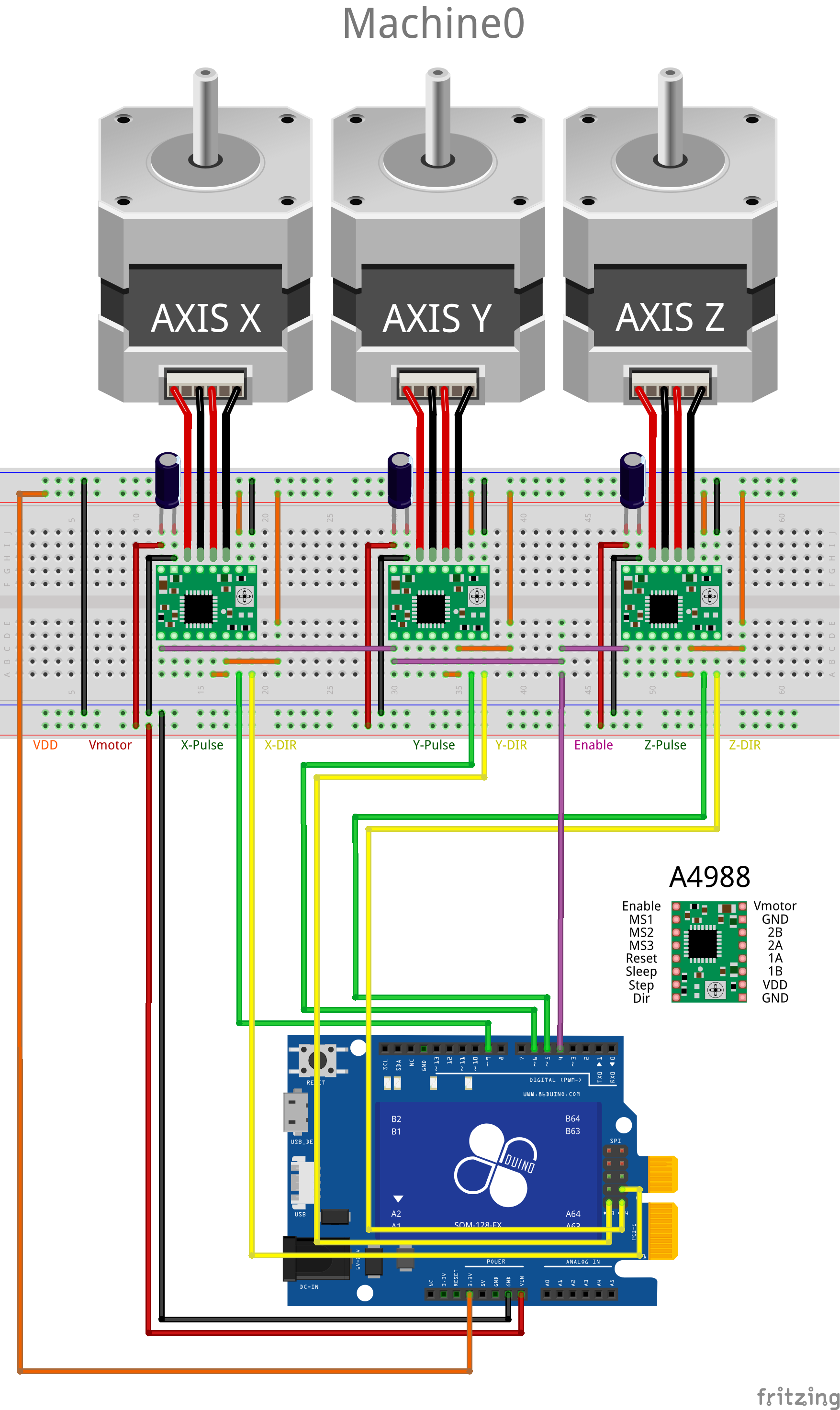
每個 Motion86 軸群提供 X-DIR / X-Pulse、Y-DIR / Y-Pulse、Z-DIR / Z-Pulse 六根接腳,分別連接至機器 X、Y、Z 三軸伺服馬達的方向與脈波輸入。其中,每一軸的脈波輸出皆提供 Pulse/DIR、CW/CCW、A/B Pulse 三種脈波模式,可在初始化階段透過 config_PulseMode() 函式進行組態。下面是每個軸群在不同型號 86Duino 開發板上的接腳對應表:
| Axis Group No. | Axis Group pin | 86Duino Zero | 86Duino One | 86Duino EduCake |
|---|---|---|---|---|
| 0 | X-DIR | 42 | 42 | 42 |
| 0 | X-Pulse | 9 | 9 | 9 |
| 0 | Y-DIR | 43 | 43 | 43 |
| 0 | Y-Pulse | 6 | 6 | 6 |
| 0 | Z-DIR | 44 | 44 | 44 |
| 0 | Z-Pulse | 5 | 5 | 5 |
| 1 | X-DIR | Not Support | 18 | 18 |
| 1 | X-Pulse | Not Support | 13 | 13 |
| 1 | Y-DIR | Not Support | 19 | 19 |
| 1 | Y-Pulse | Not Support | 11 | 11 |
| 1 | Z-DIR | Not Support | 20 | 20 |
| 1 | Z-Pulse | Not Support | 10 | 10 |
| 2 | X-DIR | Not Support | 33 | Not Support |
| 2 | X-Pulse | Not Support | 29 | Not Support |
| 2 | Y-DIR | Not Support | 34 | Not Support |
| 2 | Y-Pulse | Not Support | 30 | Not Support |
| 2 | Z-DIR | Not Support | 35 | Not Support |
| 2 | Z-Pulse | Not Support | 31 | Not Support |
以下是 Maker 常用的 3D 列印機和 CNC 雕刻機的 A4988 步進馬達驅動器的範例,並提供了不同型號 86Duino 開發板上各軸組的接線範例:
Machine 類別
此類別提供 XYZ 機器軸組的配置和控制方法,並添加了更多高級功能,以實現更靈活、更通用的運動控制。
基本方法
基本控制
- line()
- arcXY()
- arcXZ()
- arcYZ()
- arcXY_Theta()
- arcXZ_Theta()
- arcYZ_Theta()
- circleXY()
- circleXZ()
- circleYZ()
- helicalXY()
- helicalXZ()
- helicalYZ()
寫入配置
- config_MaxVelocity()
- config_MaxAcc()
- config_PosLimit()
- config_PPU()
- config_ReverseDirection()
- config_MaxPulseSpeed()
- config_PulseMode()
- config_HomePins()
- setDefaultFeedrate()
- setHomeSpeed()
- setRelative()
- setAbsolute()
- enableSoftLimit()
- disableSoftLimit()
讀取配置
- getMaxVelocity()
- getMaxAcc()
- getPPU()
- getActualPos()
- getPulseMode()
- getCmdCount()
- getFreeCmdCount()
- isDirectionReversed()
- isMoving()
- isValid()
- isCmdBufferFull()
JOG / MPG 控制
- beginJog()
- endJog()
- setJogSpeed()
- setJogOffset()
- beginMpg()
- endMpg()
- setMpgSpeed()
- setMpgAxis()
- setMpgRatio()
- getJogPos()
速度重置功能
軸跟隨功能
計算工具協助
使用限制
Motion86 函式庫在運作時會使用 86Duino 內部的計時器 (Timer),TimerWDT 函式庫和 AIServo86 函式庫也會使用該計時器,因此為了避免函式庫彼此發生衝突,這幾個函式庫不能同時使用。
演示影片
函式庫參考主頁面
86Duino 參考的文本是根據 知識共享署名-相同方式分享 3.0 許可證,部分文本是從 Arduino 參考 修改的。 參考中的代碼示例已發佈到公共領域。