[Motion86]
描述
Get the PPU value of the machine in the specified axis.
The relationship of PPU (Pulse per Unit) is as follows.
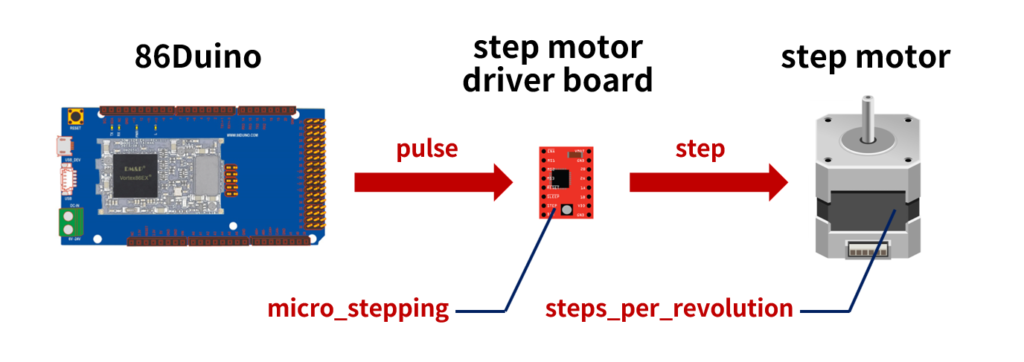
86Duino sends a pulse to the stepper motor driver board, which sends a step to rotate the stepper motor.
micro_stepping
The number of pulses received from the 86Duino to type a step on the stepper motor driver board.steps_per_revolution
The parameter on the stepper motor, the number of steps to be received from the stepper motor driver board to make one revolution.
The formula for pulses_per_revolution is steps_per_revolution * micro_stepping.
- PPU: The number of pulses required to move the machine axis per unit distance. e.g. 80 pulses/mm.
語法
machine.getPPU(axis);
參數
machine:為 Machine 物件。axis: is the motion axis of the PPU, it can be AXIS_X, AXIS_Y or AXIS_Z.
回傳
double: Return the PPU value of the motion axis.
參考
函式庫參考主頁面
86Duino 參考的文本是根據 知識共享署名-相同方式分享 3.0 許可證,部分文本是從 Arduino 參考 修改的。 參考中的代碼示例已發佈到公共領域。