[Motion86]
説明
Get the PPU value of the machine in the specified axis.
The relationship of PPU (Pulse per Unit) is as follows.
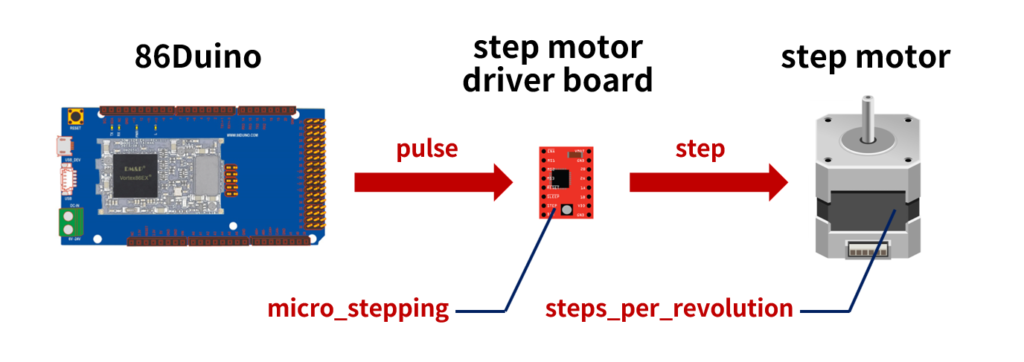
86Duino sends a pulse to the stepper motor driver board, which sends a step to rotate the stepper motor.
micro_stepping
The number of pulses received from the 86Duino to type a step on the stepper motor driver board.steps_per_revolution
The parameter on the stepper motor, the number of steps to be received from the stepper motor driver board to make one revolution.
The formula for pulses_per_revolution is steps_per_revolution * micro_stepping.
- PPU: The number of pulses required to move the machine axis per unit distance. e.g. 80 pulses/mm.
構文
machine.getPPU(axis);
媒介変数
machine: is the Machine object.axis: is the motion axis of the PPU, it can be AXIS_X, AXIS_Y or AXIS_Z.
戻り値
double: Return the PPU value of the motion axis.
参照
ライブラリリファレンスホーム
86Duinoリファレンスのテキストは、Arduinoリファレンスを改変したもので、Creative Commons Attribution-ShareAlike 3.0ライセンスに基づいてライセンスされています。リファレンス内のコードサンプルはパブリックドメインとして公開されています。