これ QEC ETG.7200 テストツール は QEC プラットフォーム(86Duino + 86HMI)上で動作するグラフィカルな EtherCAT テストアプリケーションです。任意の EtherCAT SubDevice を接続し HMI を起動すると、デバイスの識別・PDO マッピングの設定・分散クロックの同期・CiA 402 サーボドライブの運転・オブジェクト辞書全体の閲覧が、すべてタッチスクリーンから直接行えます。
ETG.7200 テスト仕様を実装しているため、I/O モジュール・サーボドライブ・センサー・エンコーダーなど、標準準拠の SubDevice はすべて同じ方法で動作します。
Download the User Manual (PDF, English, 3.9 MB) | 中文版 PDF
1. 概要
- 識別 30 秒で任意の EtherCAT SubDevice を識別 — Vendor ID・Product Code・対応プロトコル
- マッピング PDO マッピング(RxPDO/TxPDO)を設定し I/O を双方向で検証
- 駆動サーボ PP・PV・HM・CSP・CSV・CST モードで CiA 402 サーボを運転 — アプリケーションコード不要
2. 6 つのデモ — 実際のベンチセッションを順を追って解説
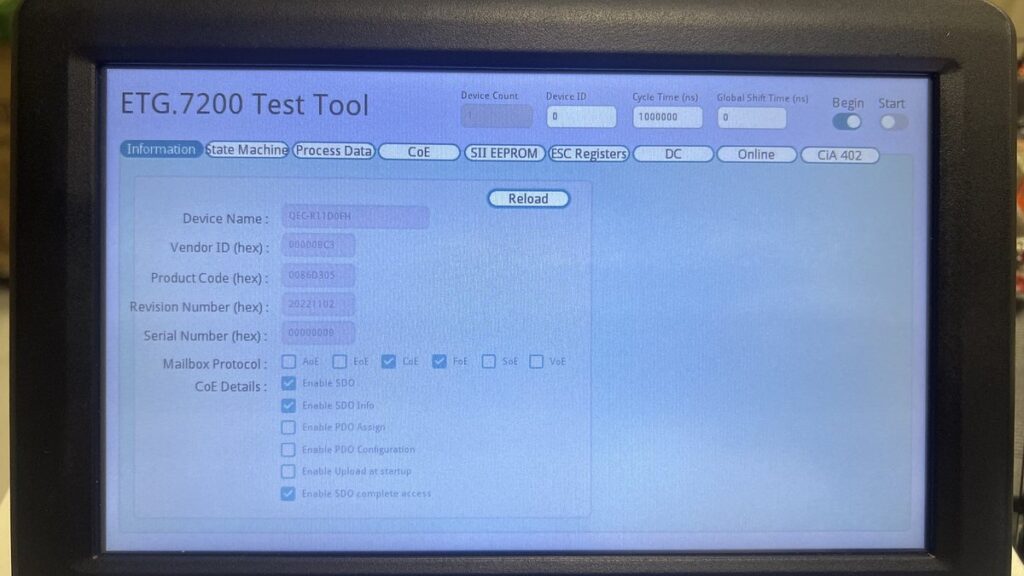
2.1 デモ 1 — 30 秒で任意の SubDevice を識別
切り替え Begin 切り替え Begin を ON に、Information タブに移動して Reload をクリックします。ツールが master.begin() を呼び出し、SubDevice の識別情報が自動的に入力されます。Vendor ID と Product Code をベンダーの ESI ファイルと一目で照合できます。
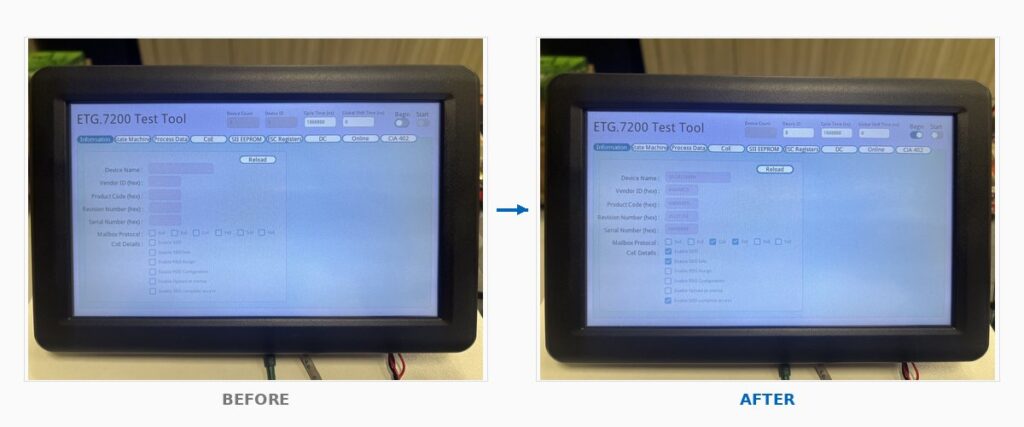
操作前後:Begin OFF の空の Information タブが、Begin + Reload 後に識別フィールドが完全に入力された状態に変わります。
2.2 デモ 2 — PDO を設定して I/O が点灯するのを確認
Process Data タブで RxPDO / TxPDO インデックスを選択し Download をクリックします。sdoDownload() が割り当てを SubDevice に書き戻します。スレーブを Op 状態にして Online タブに切り替え、出力ビットを 1 つトグルするとフィールド LED が点灯します。実際の入力をトリガーするとビットが画面上で反転します。
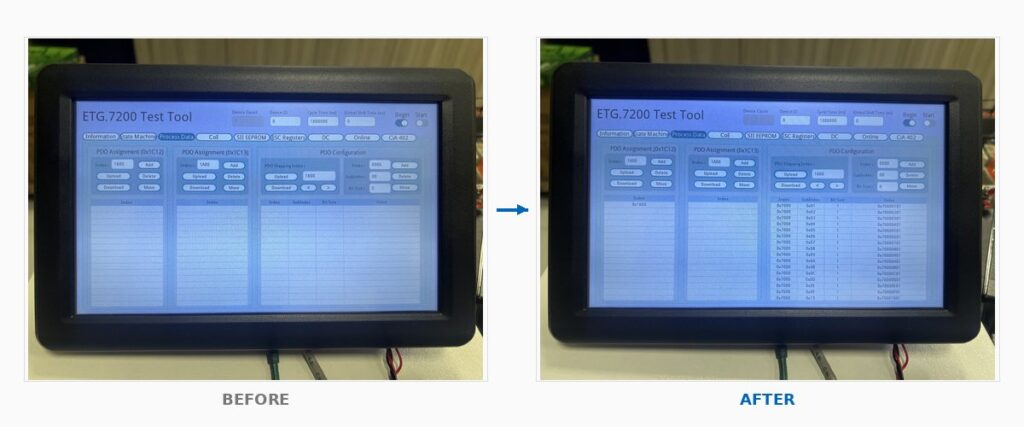
操作前後:PDO Assignment が空の Process Data タブが、0x7000 サブインデックスを示す 0x1600 RxPDO マッピングで埋められた状態に変わります。
2.3 デモ 3 — ワンボタンで分散クロックを同期
DC タブでは SYNC0 / SYNC1 サイクル倍率と SubDevice ごとの Shift Time がシンプルなドロップダウンで表示されます。倍率を選択して Set をクリックすると setDc() が呼び出されます。Global Shift Time を 0 のままにすると、Start をトグルしたときにマスターが安全なシフトを自動的に計算します。
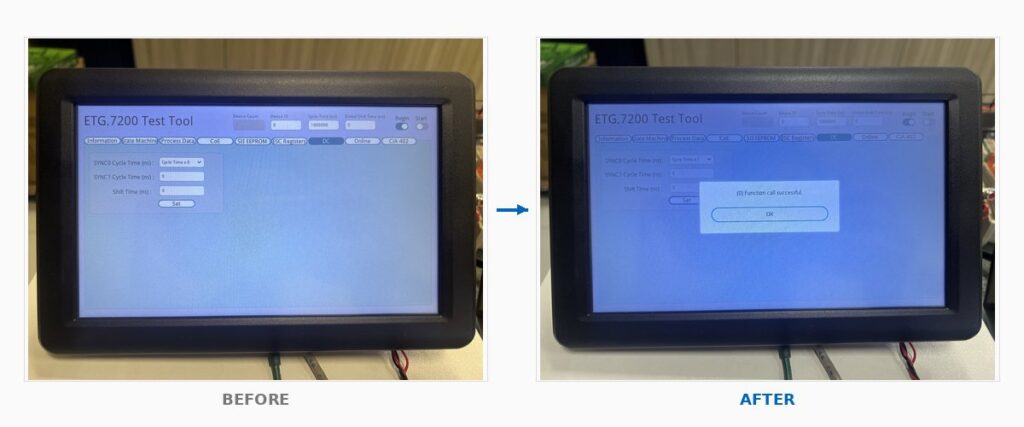
操作前後:SYNC0 Cycle Time x 0 の空の DC タブが、Set 呼び出し成功の確認ダイアログに変わります。
2.4 デモ 4 — Profile Position モードで CiA 402 サーボを運転
任意の CiA 402 準拠サーボを接続します。軸番号を入力して Attach をクリックすると、ツールがドライブのモーションパラメーターをプリロードします。PP モードを選択し Profile Velocity / Acceleration / Deceleration を設定して Enable をクリックし、目標位置を入力して Run を押します。Servo Status パネルが Position Actual Value を目標値まで追跡し、最終的に Target Reached が点灯します。
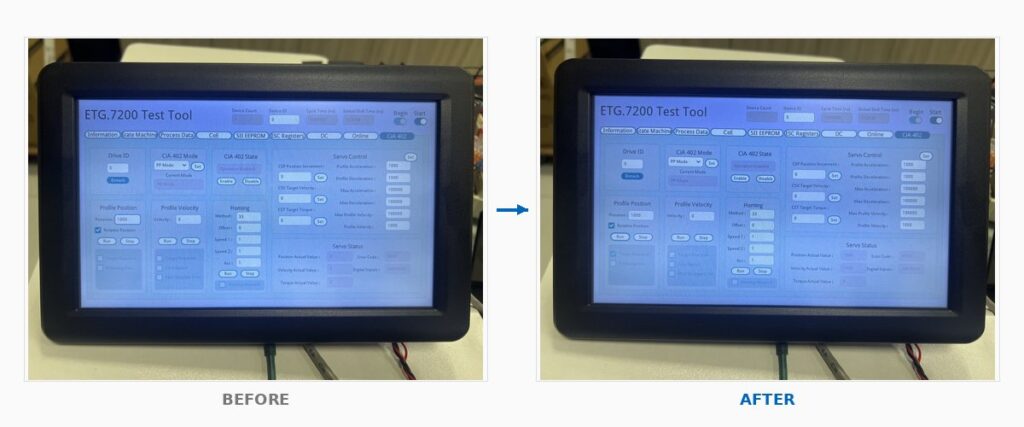
操作前後:Position=1000 で準備完了の Profile Position パネルが、Position Actual Value が目標値と一致し Target Reached がチェックされた状態に変わります。
2.5 デモ 5 — CSP モードでサーボを周期的に運転
同じドライブを CSP(Cyclic Synchronous Position)モードに切り替えます。CSP Position Increment(例:1 サイクルあたり 1 カウント)を入力して Set をクリックすると、マスターが毎 EtherCAT サイクルに新しい目標位置をプッシュします。DC 同期が機能しているため速度は安定します。符号を反転すると方向が逆になり、Increment を 0 に設定すると即座に停止します。
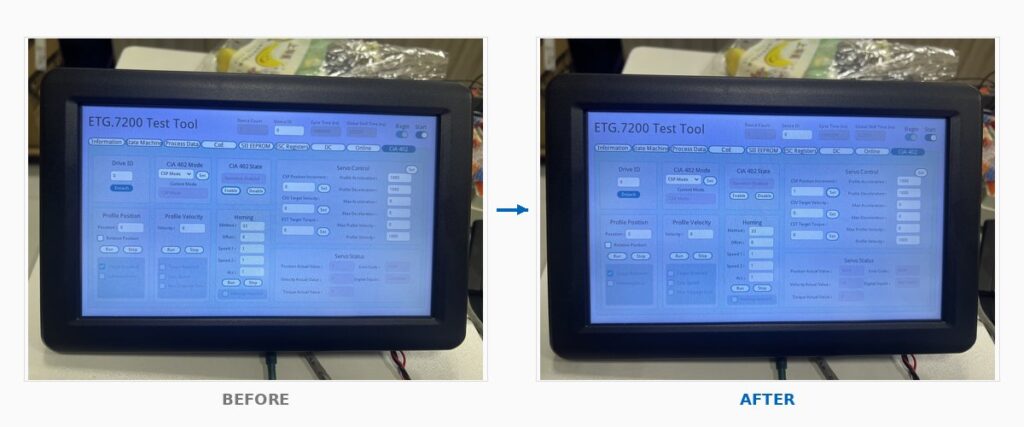
操作前後: CSP モードの動作が有効で、増分=0 の場合、モーターは依然として増分=1 になり、位置の実際の値は 3553 まで蓄積され、速度は 18 を示します。
2.6 デモ 6 — オブジェクト辞書全体を閲覧し、任意のパラメーターを書き込む
CoE タブで OD Generation を 1 回クリックします。ツールが getODlist()・getObjectDescription()・getEntryDescription() を呼び出して SubDevice の完全なオブジェクト辞書をインポートします。Reload をクリックするとすべてのエントリーの値が入力されます。任意のオブジェクト(例:6080h Max Motor Speed)を選択して新しい値を入力し Download をクリックし、再 Upload で確認します。SubDevice からの Emergency Message がリアルタイムで下部テーブルにストリームされます。
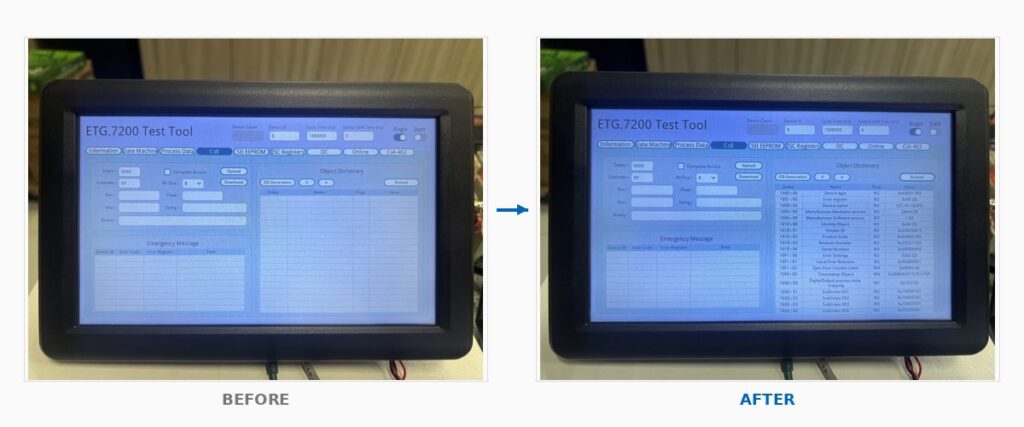
操作前後:元々空だったCoEタブ(オブジェクト辞書なし)が、1000hから6099hまでのすべてのインデックス/名前/フラグ/値のエントリを表示する、完全にデータが入力されたテーブルになりました。
3. なぜエンジニアリング時間を節約できるのか
- 初期検証にマスター側のコードは不要です。 接続・電源投入・クリックで、アプリケーションコードを 1 行も書く前に SubDevice の動作を確認できます。
- あらゆる操作に視覚的な確認があります。 すべての操作は確認ダイアログで成功を示すか、デコードされたエラーコード付きの Emergency Message を表示します。ログを調べる必要はありません。
- 1 つのワークフロー、あらゆるデバイスに対応。 同じツールで I/O モジュール・サーボ・センサー・エンコーダーなど ETG.7200 準拠のあらゆるデバイスを操作できます。
- 量産テストの基盤。 ツール内のすべての操作がマニュアルに記載された C/C++ EtherCAT API に明確にマッピングされるため、検証済みの SubDevice は量産ファームウェアにシームレスに移行できます。
4. マニュアルの内容
完全版 v1.6 ユーザーマニュアルは 58 ページで 、以下を網羅しています:
- 第 1 章 — ツール概要とグローバルツールバー
- 第 2 〜 10 章 — 全 9 タブの詳細リファレンス
- 第 11 章 — トラブルシューティング参照表
- 第 12 章 — 6 つのエンドツーエンドのハンズオンシナリオ
- 第 13 章 — 完全な EtherCAT API リファレンス(マスター・SDO/PDO/FoE・CiA 402)
- 第 14 章 — ECAT_ERR_* エラーコードリファレンス
Download the User Manual (PDF, English, 3.9 MB) | 中文版 PDF
5. 必要なもの
| 部件 | 要件 |
|---|---|
| Mainデバイス | QEC プラットフォーム(86Duino 本体 + 86HMI パネル) |
| Subデバイス | ETG.7200 仕様に準拠した任意のデバイス |
| ケーブル | 標準 EtherCAT ケーブル(Cat 5e 以上)、QEC の指定 EtherCAT ポートに接続 |
| 電源 | SubDevice 用の独立した 24V 電源 |
| オプション | SubDevice 識別照合用のベンダー ESI ファイル |
6. リソース
- QEC プラットフォーム(86Duino 本体 + 86HMI パネル): 概要
- EtherCAT MainDeviceのサンプルコード: ダウンロード
- エンジニアリング部門に相談する: お問い合わせ
- 公式ETG.7200仕様: EtherCAT Technology Group
詳細情報やサンプルのご要望については、info@icop.com.tw までメールをお送りいただくか、最寄りの ICOP 支店 までお電話いただくか、ワールドワイド正規販売代理店までお問い合わせください。