這個 QEC ETG.7200 測試工具 是一款在 QEC 平台(86Duino + 86HMI)上執行的圖形化 EtherCAT 測試應用程式。插入任何 EtherCAT SubDevice、開機 HMI,即可識別設備、設定 PDO 映射、同步分散式時鐘、運行 CiA 402 伺服驅動器,並瀏覽完整的物件字典 — 全部直接在觸控螢幕上操作。
本工具實作 ETG.7200 測試規範,因此任何符合標準的 SubDevice — I/O 模組、伺服驅動器、感測器、編碼器 — 均以相同方式運作。
Download the User Manual (PDF, English, 3.9 MB) | 中文版 PDF
1. 快速概覽
- 識別 30 秒內識別任何 EtherCAT SubDevice — Vendor ID、Product Code、支援的協定
- 映射 設定 PDO 映射(RxPDO/TxPDO)並雙向驗證 I/O
- 驅動伺服 以 PP、PV、HM、CSP、CSV 或 CST 模式驅動 CiA 402 伺服 — 無需撰寫應用程式碼
2. 六個示範,帶您完整走過一次實際測試流程
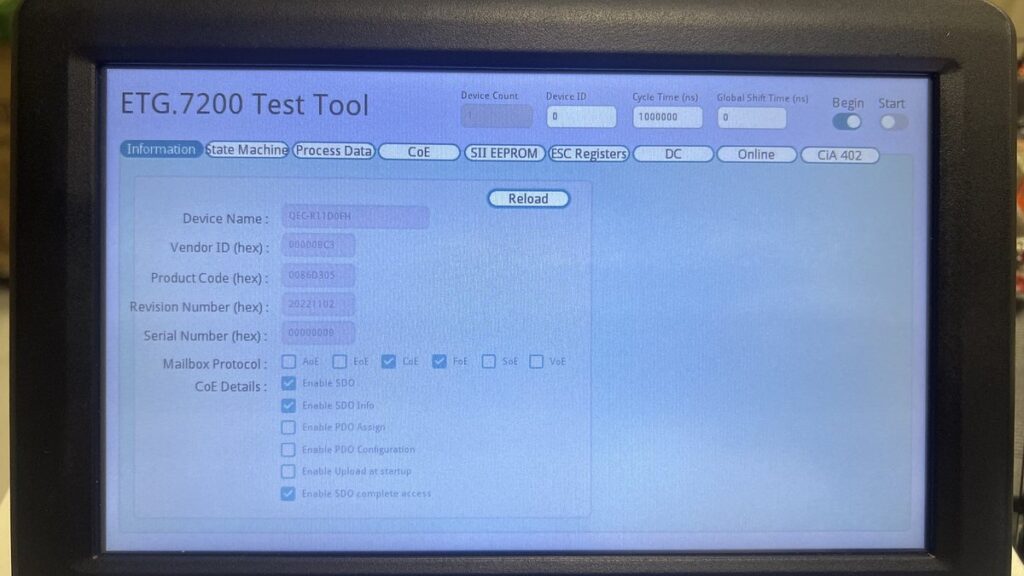
2.1 示範 1 — 30 秒內識別任何 SubDevice
切換 Begin 為 ON,切換至 Information 頁籤並點擊 Reload。工具呼叫 master.begin(),SubDevice 的識別資訊自動填入,可一眼與廠商的 ESI 檔案核對 Vendor ID 與 Product Code。
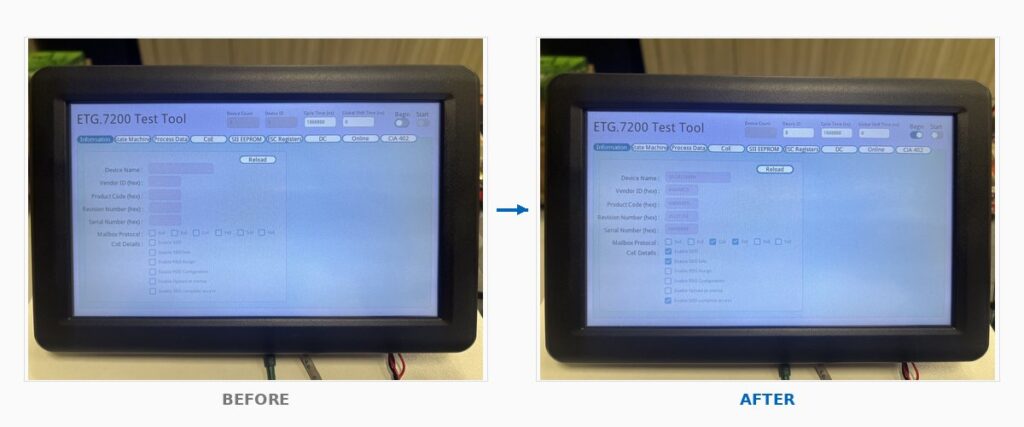
操作前後:Begin 關閉時的空白 Information 頁籤,在 Begin + Reload 後變為完整填入的識別欄位。
2.2 示範 2 — 設定 PDO 並觀察 I/O 亮起
在 Process Data 頁籤中選擇 RxPDO / TxPDO 索引並點擊 Download。sdoDownload() 將分配寫回 SubDevice。將從設備切換至 Op 狀態,切換至 Online 頁籤,切換單一輸出位元 — 現場 LED 亮起。觸發實際輸入 — 畫面上的位元翻轉。
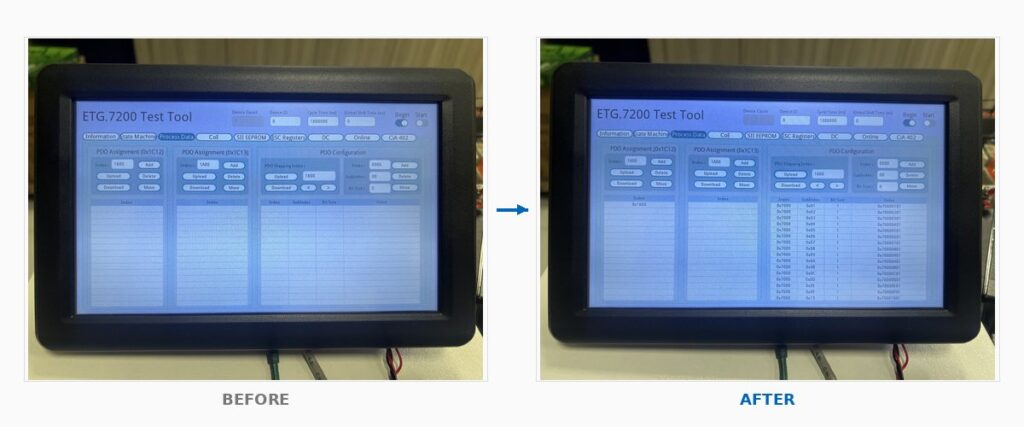
操作前後:PDO Assignment 空白的 Process Data 頁籤,變為填入 0x1600 RxPDO 映射並顯示 0x7000 子索引。
2.3 示範 3 — 一鍵同步分散式時鐘
DC 頁籤以下拉選單呈現 SYNC0 / SYNC1 週期倍數與每個從設備的 Shift Time。選擇倍數、點擊 Set,即呼叫 setDc()。將 Global Shift Time 保持為 0,可讓主設備在切換 Start 時自動計算安全位移值。
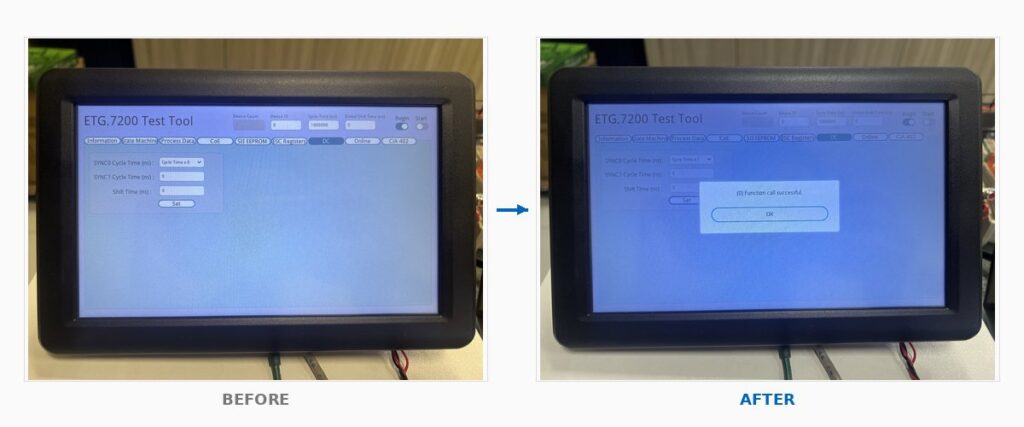
操作前後:SYNC0 Cycle Time x 0 的空白 DC 頁籤,變為 Set 呼叫成功的確認對話框。
2.4 示範 4 — 以 Profile Position 模式運行 CiA 402 伺服
插入任何符合 CiA 402 的伺服驅動器。輸入軸號、點擊 Attach,工具預先載入驅動器的運動參數。選擇 PP 模式,設定 Profile Velocity / Acceleration / Deceleration,點擊 Enable,輸入目標位置,按下 Run。Servo Status 面板追蹤 Position Actual Value 至目標值,最後 Target Reached 亮起。
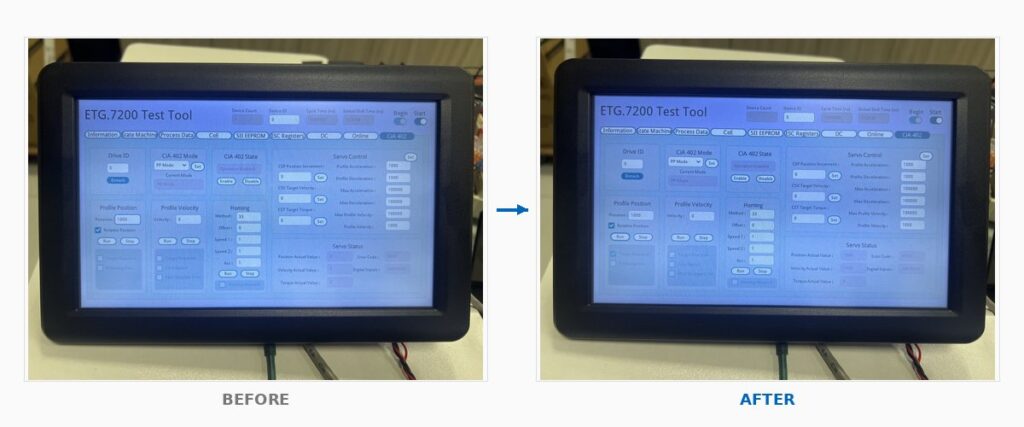
操作前後:Position=1000 就緒的 Profile Position 面板,變為 Target Reached 已勾選且 Position Actual Value 符合目標值。
2.5 示範 5 — 以 CSP 模式週期性驅動伺服
將同一驅動器切換至 CSP(週期同步位置)模式。輸入 CSP Position Increment(例如每週期 1 count),點擊 Set,主設備每個 EtherCAT 週期推送新目標位置。速度保持穩定,因為 DC 同步正在發揮作用。翻轉正負號可反轉方向,將 Increment 設為 0 可立即停止。
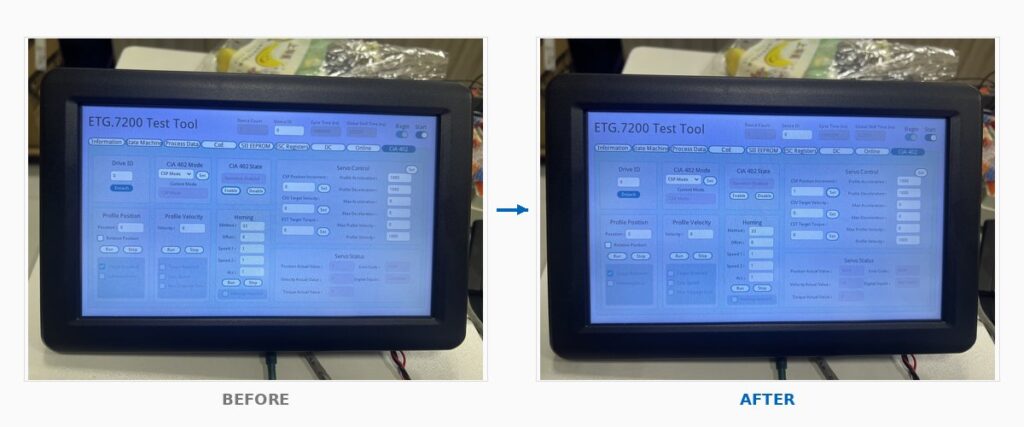
操作前後:CSP 模式操作啟用,增量=0,馬達仍變成增量=1,位置實際值累積到 3553,速度顯示 18。
2.6 示範 6 — 瀏覽完整物件字典,寫入任意參數
在 CoE 頁籤中,點擊 OD Generation 一次。工具呼叫 getODlist()、getObjectDescription() 與 getEntryDescription() 匯入 SubDevice 的完整物件字典。點擊 Reload,所有條目的值填入完成。選擇任意物件 — 例如 6080h Max Motor Speed — 輸入新值,點擊 Download,再 Upload 驗證。SubDevice 的緊急訊息即時串流至底部表格。
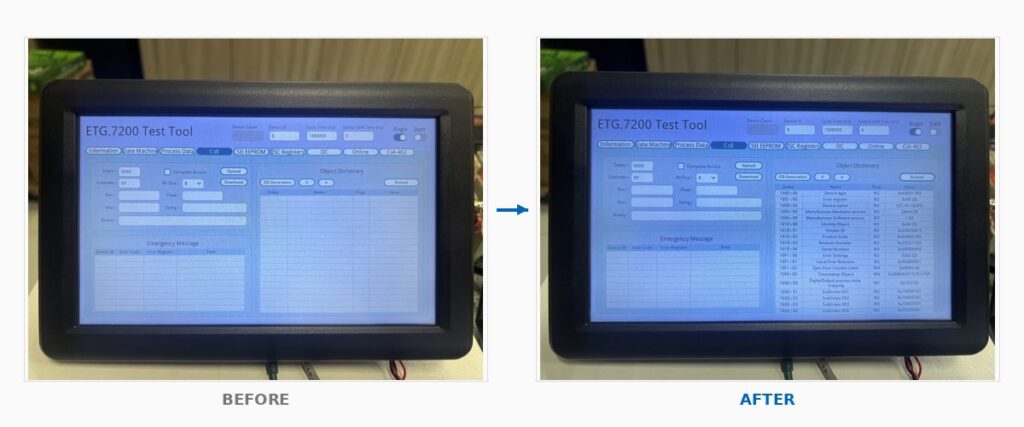
操作前後:原本空的 CoE 選項卡(沒有物件字典)變成了一個完全填充的表格,顯示了從 1000h 到 6099h 的所有索引/名稱/標誌/值條目。
3. 為什麼這能節省工程時間
- 初始驗證不需要主設備端程式碼。 插入、供電、點擊,在撰寫任何一行應用程式碼之前即可驗證 SubDevice 運作正常。
- 處處均有視覺確認。 每個操作要麼以確認對話框顯示成功,要麼顯示帶有解碼錯誤碼的緊急訊息,無需翻查日誌。
- 單一工作流程,適用任何設備。 同一工具引導您完成 I/O 模組、伺服驅動器、感測器、編碼器 — 任何符合 ETG.7200 的設備。
- 量產測試的基礎。 工具中的每個操作都清晰對應手冊中記錄的 C/C++ EtherCAT API,因此驗證通過的 SubDevice 可無縫移轉至量產韌體。
4. 手冊內容
完整的 v1.6 使用手冊共 58 頁 ,涵蓋:
- 第 1 章 — 工具概覽與全域工具列
- 第 2 至 10 章 — 全部九個頁籤的詳細說明
- 第 11 章 — 故障排除參考表
- 第 12 章 — 六個端對端實作情境
- 第 13 章 — 完整 EtherCAT API 參考(主設備、SDO/PDO/FoE、CiA 402
- 第 14 章 — ECAT_ERR_* 錯誤碼參考
Download the User Manual (PDF, English, 3.9 MB) | 中文版 PDF
5. 所需設備
| 部件 | 必要條件 |
|---|---|
| 主站 | QEC 平台(86Duino 主機 + 86HMI 面板) |
| 從站 | 任何符合 ETG.7200 規範的設備 |
| 纜線 | 標準 EtherCAT 纜線(Cat 5e 以上),連接至 QEC 指定的 EtherCAT 埠 |
| 電源 | SubDevice 的獨立 24V 電源 |
| 選配 | 用於 SubDevice 識別核對的廠商 ESI 檔案 |
6. 資源
- QEC 平台(86Duino 主機 + 86HMI 面板): 概述
- EtherCAT 主站 範例程式碼: 下載
- 聯絡工程部門: 聯絡我們
- ETG.7200官方規格: EtherCAT Technology Group
如需更多資訊或樣品申請,請寄信至 info@icop.com.tw、致電最近的 ICOP 分支機構,或聯絡我們的全球官方經銷商。