")

")



QEC-RXXMPシリーズは、2相バイポーラ0.9度ステッピングモータを3軸同時に駆動しながら、125μsの高速同期が可能なEtherCATステッピングモータコントローラです。A、B、Zエンコーダインターフェースを装備し、モータのクローズドループ制御を実現します。
そのコア機能はEtherCAT標準CiA402通信とGコードプログラミング言語をサポートしており、特にCNCアプリケーションなど様々なシステムへのコントローラの統合を容易にします。Gコードとの互換性は、このプログラミング言語に対するコントローラの高い適応性を示しています。
QEC-RXXMPシリーズは、コンフォーマンステストツールの検証に合格しており、管理や精密なモーションコントロールなど、様々な従来の産業用オートメーションアプリケーションに適しています。EtherCATプロトコルを利用することで、システムの安定性と信頼性を高めています。このため、自動化された生産ラインやロボットなど、微細な制御を必要とする機器に最適です。
CiA402とGコードを組み合わせた統合EtherCATステッピングモータ制御ソリューション
QEC-RXXMPシリーズは標準EtherCATスレーブであり、デバイスを動作させるにはEtherCATマスタが必要です。3つの動作モードをサポートしています: フリーラン、SyncManager2、分散クロック(DC)です。効率的なEtherCATプロトコルを利用することで、QEC-RXXMPシリーズコントローラは125マイクロ秒という超短サイクルタイムでデータ交換を完了し、3軸ステッピングモータの高精度同期モーション制御を実現します。迅速な応答が要求されるマシンビジョンシステムでも、正確な位置決めが要求されるロボットアームでも、このコントローラは究極の制御性能を発揮します。

QEC-RXXMPシリーズは、EtherCATの標準であるCiA402ドライブプロファイルをサポートし、様々な制御システムとのシームレスな統合を可能にするだけでなく、CNC工作機械で広く使用されているプログラミング言語であるGコードも解読できます。この機能により、複雑なCNC機械加工や精密なモーションコントロールの領域で優れた性能を発揮します。
CiA402でサポートされているモードには、PP(Profile Position)、ホーミング、CSP(Cyclic Synchronous Position)、CSV(Cyclic Synchronous Velocity)がある。例えば、PPモードでは、コントローラはモータを目標位置まで駆動し、CSVモードでは、モータを目標速度まで加速し、すべてのモーション・パラメータはリアルタイムで調整可能です。
Gコードに関しては、一般的なCNCプログラミング言語であり、CNC工作機械と関連機器用の命令セットを提供する。工具の移動軌跡、速度、回転、およびスイッチングやクーラント制御のような他の機能を指定します。QEC-RXXMPシリーズのGコードサポートは、Gコード命令を直接解釈できることを意味し、きめ細かいモーションコントロールと加工操作を実現します。これにより、ユーザーは面倒な変換や追加のプログラミングをすることなく、標準的なGコードファイルを使用して複雑な加工タスクをプログラムし、実行することができます。
CiA402のサポートにより、コントローラは位置、速度、トルク制御などの複雑なモーション・コントロール・タスクに対応できる。また、Gコードとの互換性により、CNCプログラミングの直接サポートが可能です。これにより、QEC-RXXMPシリーズは単なるステッピングモーターコントローラではなく、包括的なモーションコントロールソリューションとなっています。
QEC-RXXMP: Achieves 125μs High-Speed Synchronization for Three-Axis Stepper Motor Control with Encoder Interface
The QEC-RXXMP series can control up to three axes of stepper motors, supporting two-phase bipolar stepper motors with a 0.9-degree step angle. These motors can be directly connected to the QEC-RXXMP device. This device is compatible with encoders for closed-loop control of the stepper motors.
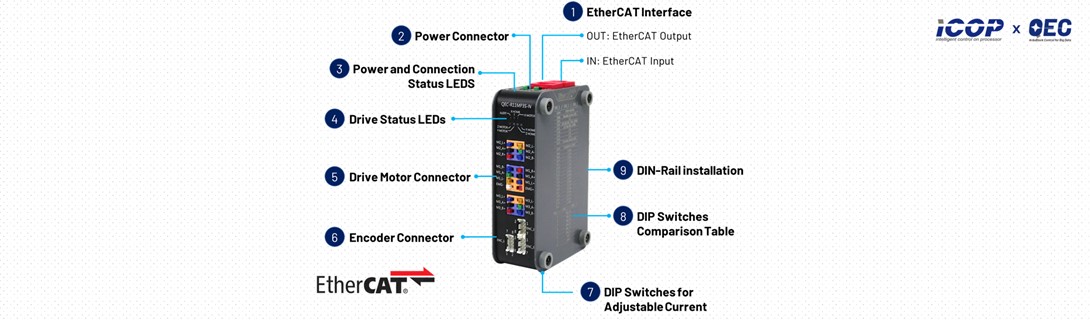
This EtherCAT stepper motor controller is capable of achieving 125μs high-speed synchronous control across three axes, effectively managing complex motion requirements. It can continuously provide a maximum drive current of up to 4.84A (using the TB6600HG), ensuring precise control even for the most demanding motors. The motor current output can be adjusted via DIP switches located at the bottom of the device, allowing fine-tuning of performance based on the specific application. Additionally, when the motor is not in motion, the QEC-RXXMP series automatically reduces the current, thereby lowering energy consumption and wear, which in turn extends the motor’s lifespan. This device allows all three motor axes to share a single power source, reducing the complexity of wiring.
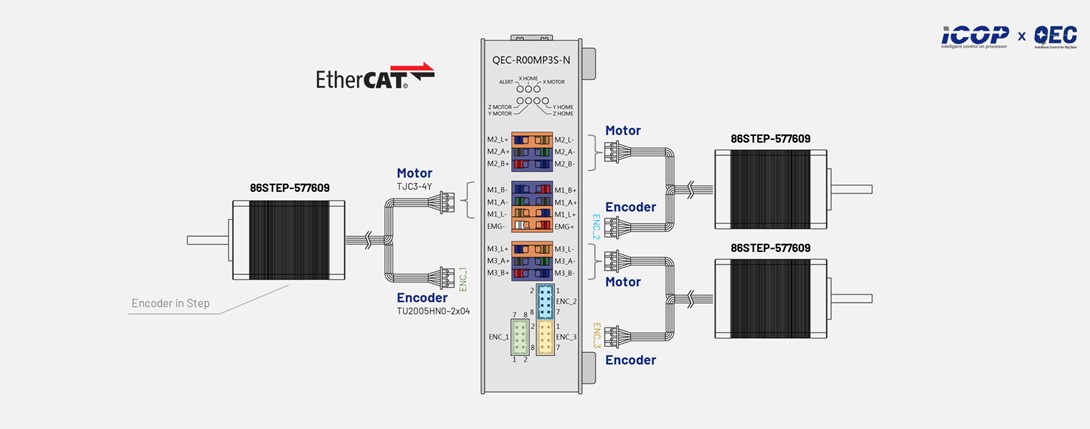
(For information about the 86STEP-577609 stepper motor, please refer to: 86STEP | 86Duino)
The QEC-RXXMP series can achieve closed-loop control of motors through its A, B, and Z encoder interfaces with differential signals, ensuring precise control, as well as strong anti-interference capabilities and reliable feedback. It also supports a high resolution of up to 16 micro-steps, which is crucial for maintaining the accuracy of motor position and speed, especially in tasks that require high precision. Each motor is equipped with a set of digital input channels that can be used for homing.
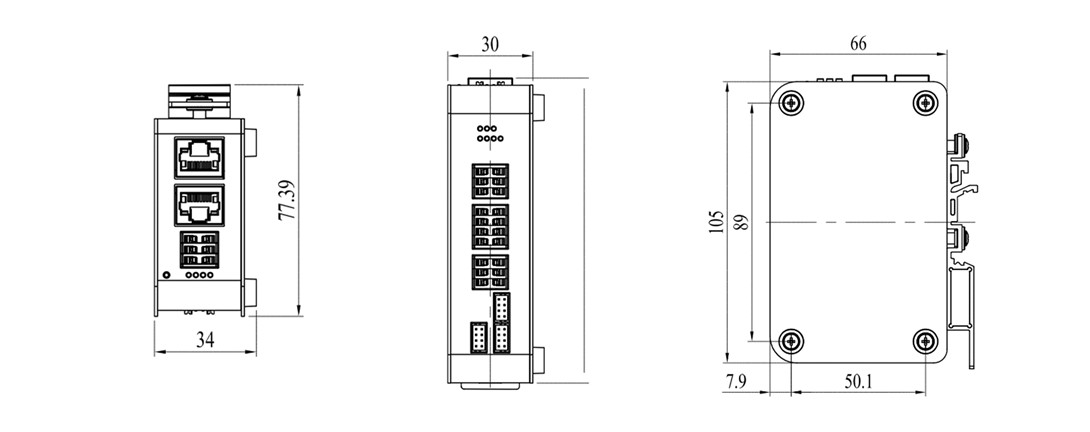
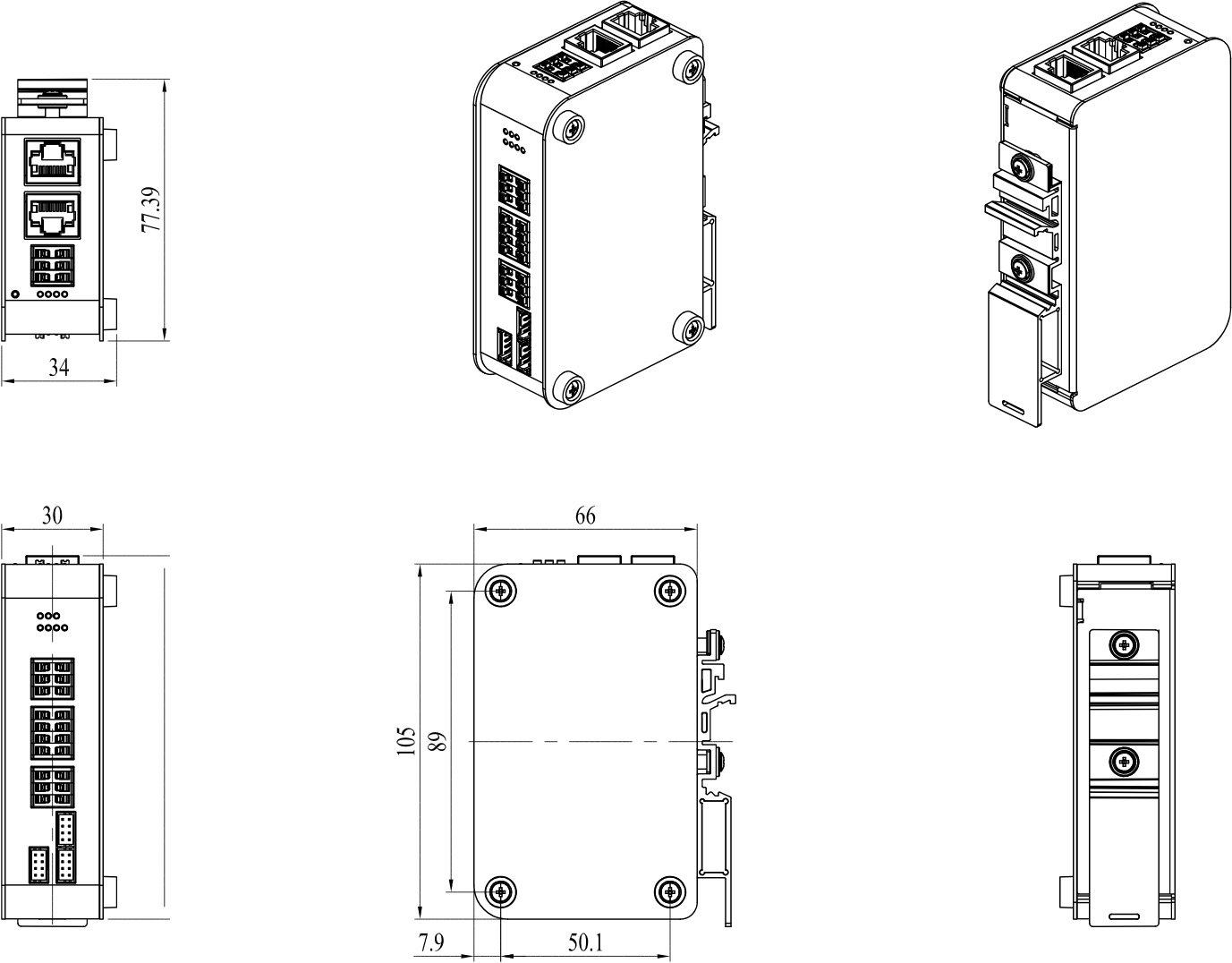
The QEC-RXXMP series has a compact size of 107.45 x 77.39 x 34 mm, making it very convenient for system installation via Din-Rail mounting. It operates within a temperature range of -20°C to +70°C and is equipped with two network ports for EtherCAT network redundancy, enhancing system reliability and stability.
Additionally, the QEC series products feature internal monitoring capabilities, able to track the internal status of voltage, current, and working temperature. These data can be used to calculate the product’s carbon emissions, aiding in carbon footprint tracking for the product.
All these monitoring data can be accessed via API calls or viewed through the graphical tools built into the QEC master station software. This makes them a valuable source for big data collection, providing additional value to industrial manufacturing products.