[チュートリアル]
This page is a start guide for using QEC-M-01 with QEC HID modules, covering RS-232/485, Keypad, LCM, MPG, wiring, EtherCAT setup, and coding examples.
エンジニアやシステム インテグレーターが QEC-M-01 (EtherCAT Mデバイス) を QEC HID シリーズ (QEC-RXXHU) と組み合わせて使用することを支援する新しいテクニカル スタート ガイドを公開しました。QEC HID シリーズは、自動化制御用の RS-232/485、キーパッド、LCM、および MPG (ハンドホイール) 機能を統合した EtherCAT ベースのモジュールです。

これらのガイドでは、配線や EtherCAT の起動からコーディング例や統合ノートまで、実用的なステップバイステップのワークフローが提供されるため、試運転を加速し、エンジニアリング時間を短縮できます。
1. システムの概要
1.1 QEC Mデバイスとは
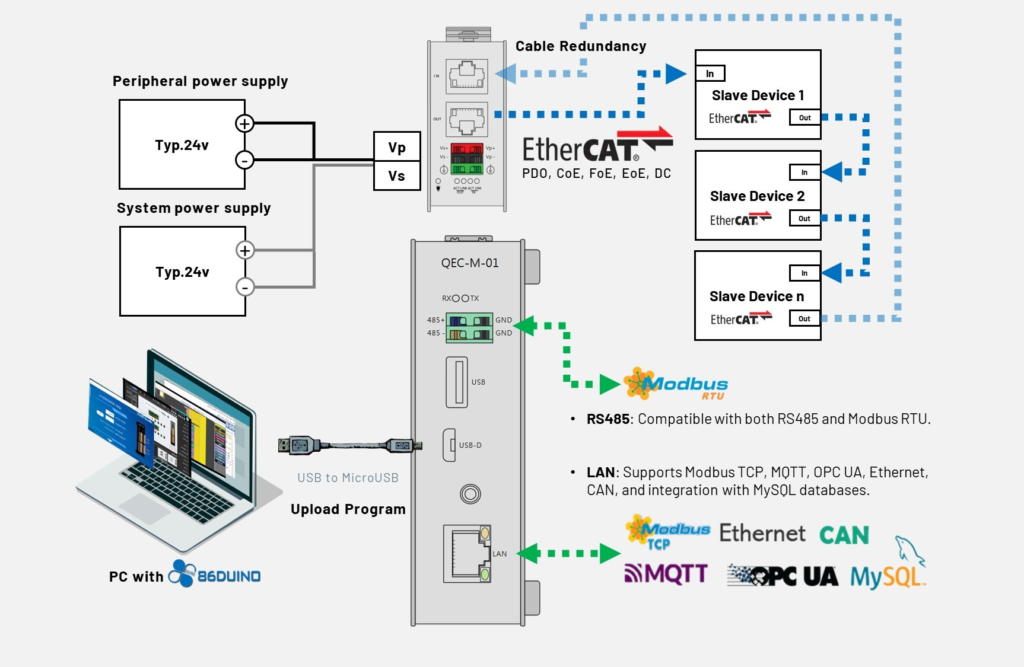
QEC-M-01は、確定的な制御と迅速な統合を実現するために設計された、コンパクトで高性能なEtherCAT Mデバイスです。オープンソースの86Duino IDEを搭載し、使い慣れた開発環境に加え、リアルタイムアーキテクチャと統合ツールを備えています。
QEC-M-01 は、EtherCAT PDO/SDO データ交換を通じて、EtherCAT ネットワーク経由で QEC HID モジュールと UART (RS-232/485)、キーパッド、LCM、および MPG データを確実に通信および交換できます。
QEC HIDシリーズ(QEC-RXXHU)のメリット
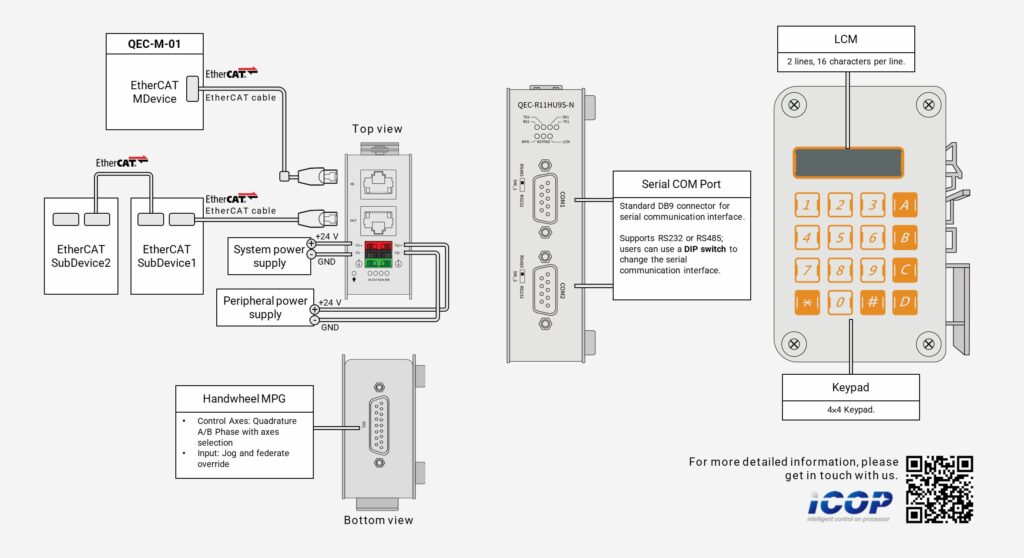
QEC HIDシリーズは、シリアル接続とオペレータインターフェースの両方のニーズに対応する豊富な機能を統合した産業グレードのEtherCATゲートウェイモジュールです。主な利点は以下のとおりです。
- ESD保護機能を備えた2つの標準UARTインターフェース、RS-232またはRS-485デバイス接続をサポート
- MPG ジョグ(ハンドホイール)により、リモート ジョグ/操作(ロボット/アームの制御など)が便利になります。
- キーパッド入力 + LCM ディスプレイによるパラメータ入力、ステータス、データの視覚化
2. 含まれるもの(スタートガイドのハイライト)

これらのスタート ガイドは実際のエンジニアリング ワークフロー向けに設計されており、次の内容が含まれます。
- ステップバイステップのセットアップガイド:
配線、EtherCAT ネットワークの立ち上げ、推奨チェックリスト - プログラミング例:
RS-232/485、MPG、キーパッド、LCM の実用的なコード スニペット - 統合のヒントとトラブルシューティング:
グラフィカルツールに関する一般的なフィールドの問題と注意事項
2.1 シリアル COM ポート (RS232/485)
このセクションでは、86Duino IDEのシリアルモニターからデータを読み取り、COM1(RS-232)からCOM2(RS-232)に転送します。COM2がデータを受信した後、シリアルモニターに出力します。
以下のプログラムは次の設定を行います:
- EtherCAT サイクル時間: 1 ミリ秒。
- EtherCAT モード: ECAT_SYNC。
これ EthercatMaster オブジェクト("master”) represents the QEC-M-01, while the EthercatDevice_QECR11HU9S オブジェクト("slave0”) represents the QEC-R11HU9S module.
サンプルコードは次のとおりです。
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_QECR11HU9S slave0;
int incomingByte = 0;
char read_ch;
void setup() {
Serial.begin(115200);
master.begin();
slave0.attach(0, master);
master.start(1000000, ECAT_SYNC);
slave0.uartSetBaud(COM1, 115200);
slave0.uartSetFormat(COM1, SERIAL_8N1);
slave0.uartSetBaud(COM2, 115200);
slave0.uartSetFormat(COM2, SERIAL_8N1);
}
void loop() {
if (Serial.available() > 0) {
incomingByte = Serial.read();
slave0.uartWrite(COM1, incomingByte);
while (slave0.uartQueryRxQueue(COM2) < 1)
slave0.update();
if ((read_ch = (char)slave0.uartRead(COM2)) > 0) {
Serial.print("COM2 receive: ");
Serial.println(read_ch);
}
}
}2.2 Keypad + LCM
このセクションでは、キーパッドからの入力を読み取り、LCMの特定の位置に出力します。キーが押されるたびにブザーが鳴ります。
以下のプログラムは次の設定を行います:
- EtherCAT サイクル時間: 1 ミリ秒。
- EtherCAT モード: ECAT_SYNC。
これ EthercatMaster オブジェクト("master”) represents the QEC-M-01, while the EthercatDevice_QECR11HU9S オブジェクト("slave0”) represents the QEC-R11HU9S module.
サンプルコードは次のとおりです。
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_QECR11HU9S slave0;
int lcmY = 1;
void setup() {
master.begin();
slave0.attach(0, master);
master.start(1000000, ECAT_SYNC);
slave0.keypadClear();
slave0.lcmClear();
}
void loop() {
char keyPadInput = slave0.keypadRead();
if (keyPadInput >= '0' && keyPadInput <= '9') {
slave0.lcmGotoXY(keyPadInput - '0' + 1, lcmY);
slave0.lcmWrite(keyPadInput);
} else if (keyPadInput >= 'A' && keyPadInput <= 'D') {
slave0.lcmGotoXY(keyPadInput - 'A' + 11, lcmY);
slave0.lcmWrite(keyPadInput);
} else if (keyPadInput == '#') {
lcmY = 1;
slave0.lcmClear();
} else if (keyPadInput == '*') {
lcmY = 2;
slave0.lcmClear();
}
if (keyPadInput != 0) slave0.buzzer(3000, 200);
slave0.update();
}2.3 MPG ハンドホイール
このセクションでは、QEC-R11HU9S の MPG データとステータスを読み取り、86Duino IDE のシリアル モニターを介して EMG、Enable、Axis、Ratio、Raw、および Logical データを出力します。
以下のプログラムは次の設定を行います:
- EtherCAT サイクル時間: 1 ミリ秒。
- EtherCAT モード: ECAT_SYNC。
これ EthercatMaster オブジェクト("master”) represents the QEC-M-01, while the EthercatDevice_QECR11HU9S オブジェクト("slave0”) represents the QEC-R11HU9S module.
サンプルコードは次のとおりです。
#include "Ethercat.h"
EthercatMaster master;
EthercatDevice_QECR11HU9S slave0;
void setup() {
Serial.begin(115200);
master.begin();
slave0.attach(0, master);
master.start(1000000, ECAT_SYNC);
}
void loop() {
// Read various parameters from the slave and print them
Serial.print("EMG: ");
Serial.print(slave0.mpgReadEmergencyStop()); // Read and print the emergency stop status
Serial.print(", Enable: ");
Serial.print(slave0.mpgReadEnableSwitch()); // Read and print the enable switch status
Serial.print(", Axis: ");
Serial.print(slave0.mpgReadAxis()); // Read and print the axis information
Serial.print(", Ratio: ");
Serial.print(slave0.mpgReadRatio()); // Read and print the ratio
Serial.print(", Raw: ");
Serial.print(slave0.mpgReadEncoderRaw()); // Read and print the raw encoder value
Serial.print(", Logical: ");
Serial.println(slave0.mpgReadEncoder()); // Read and print the logical encoder value
slave0.update();
}さらに詳しく知りたい場合は、以下のリンクをクリックして完全なガイドをご覧ください。
- RS-232/485 + Keypad + LCM + MPG – Coding
- RS-232/485 + Keypad + LCM + MPG – Coding with 86EVA
- RS-232/485 + Keypad + LCM + MPG – Coding with 86EVA and ArduBlock
シリアル接続とオペレータインターフェース統合のためにEtherCATゲートウェイを必要とするオートメーションシステムを構築する場合、QEC-M-01とQEC HID (QEC-RXXHU) シリーズを組み合わせることで実用的なソリューションが得られます。EtherCAT PDO/SDOデータ交換により、MデバイスはEtherCATネットワークを介してQEC HIDモジュールとUART (RS-232/485)、キーパッド、LCM、MPGデータを安定的に交換できます。
詳細情報やサンプルのご要望については、info@icop.com.tw までメールをお送りいただくか、最寄りの ICOP 支店 までお電話いただくか、ワールドワイド正規販売代理店までお問い合わせください。