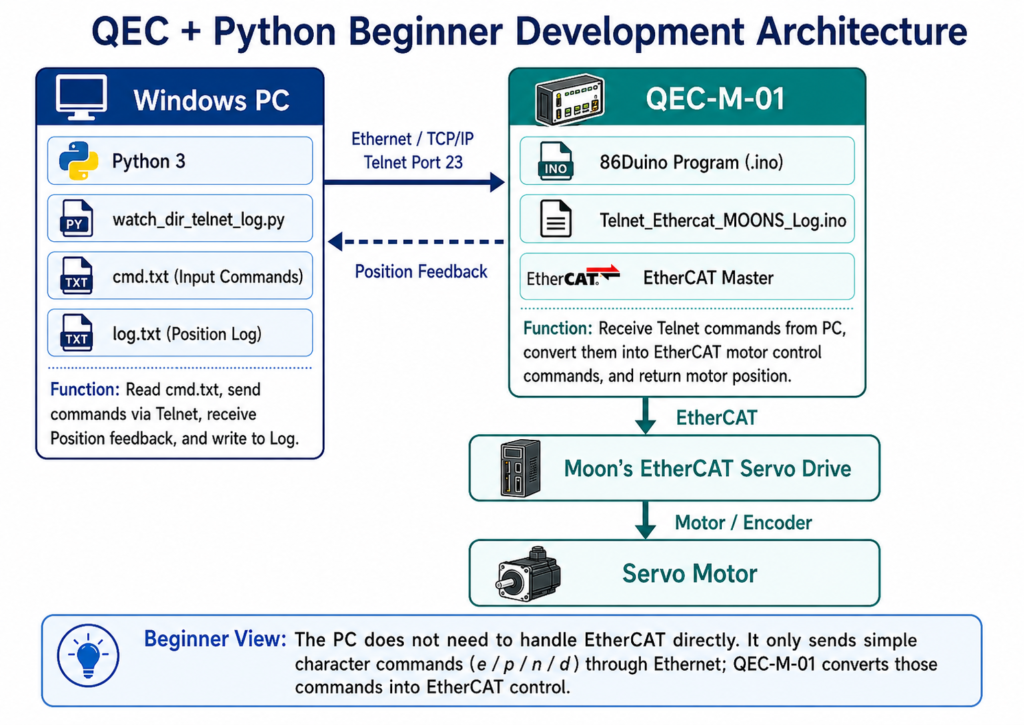
本教學示範如何透過標準乙太網路使用 Python 遠端控制 EtherCAT 馬達。
Windows PC 傳送簡單指令給執行 86Duino 程式的 QEC-M-01。QEC-M-01 負責處理 EtherCAT CiA402 馬達控制,並回傳馬達位置回饋以供記錄。
PC 端無需直接處理 EtherCAT,只需傳送 TCP/IP 指令,由 QEC-M-01 將其轉換為即時 EtherCAT 馬達控制動作。
1. 快速概覽
透過本範例,您可以:
- 從 Windows PC 控制 Moon's EtherCAT 伺服驅動器
- 透過簡單的
cmd.txt檔案傳送馬達指令 - 將馬達位置回饋記錄至
log.txt - 使用 Python 進行快速測試、資料記錄或上層自動化
- 在 QEC-M-01 上保持即時 EtherCAT 控制
無需特殊的 PC 端 EtherCAT SDK。
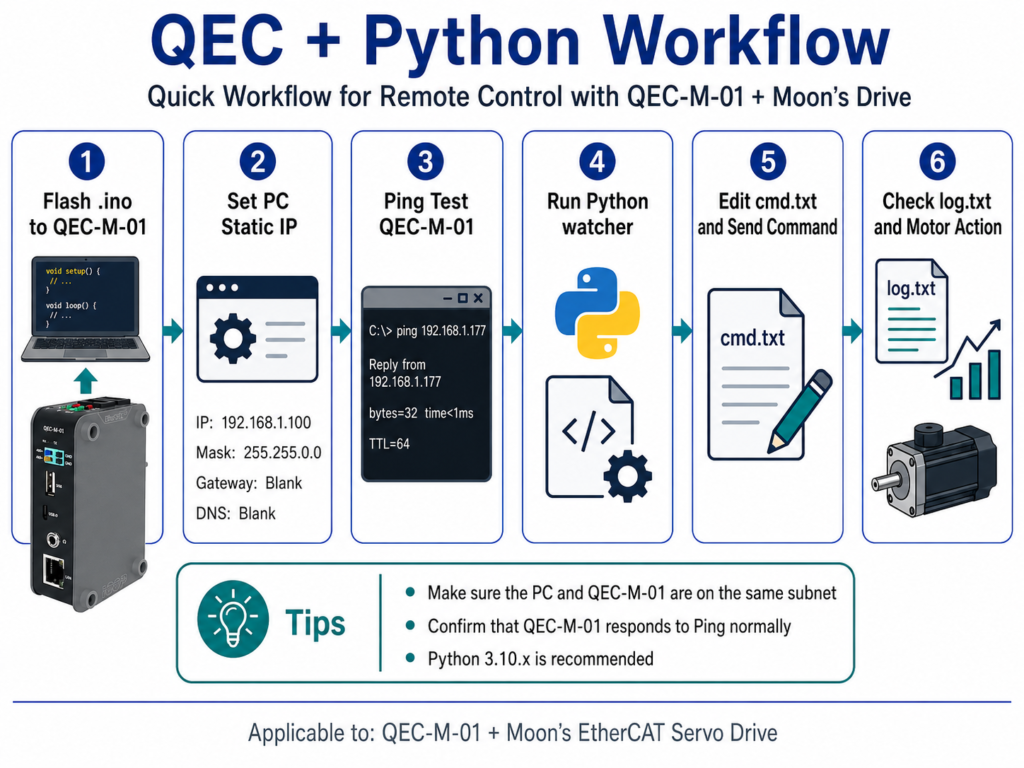
2. 工作流程
工作流程很簡單:
- 將
.ino程式燒錄至 QEC-M-01 - 設定 PC 靜態 IP
- Ping QEC-M-01
- 執行 Python 監控程式
- 編輯
cmd.txt並傳送指令 - 確認
log.txt與馬達動作
在本範例中,QEC-M-01 使用 192.168.1.177,PC 使用 192.168.1.100.
3. 指令範例
Python 監控程式執行後,編輯並儲存 cmd.txt 即可控制馬達。
| cmd.txt | 動作 | 描述 |
|---|---|---|
e | Enable | 啟用馬達 |
p | Move + | 移動至 +100,000 脈衝 |
n | Move – | 移動至 -100,000 脈衝 |
d | Disable | 停用馬達 |
Python 程式自動偵測檔案變更並傳送指令至 QEC-M-01。
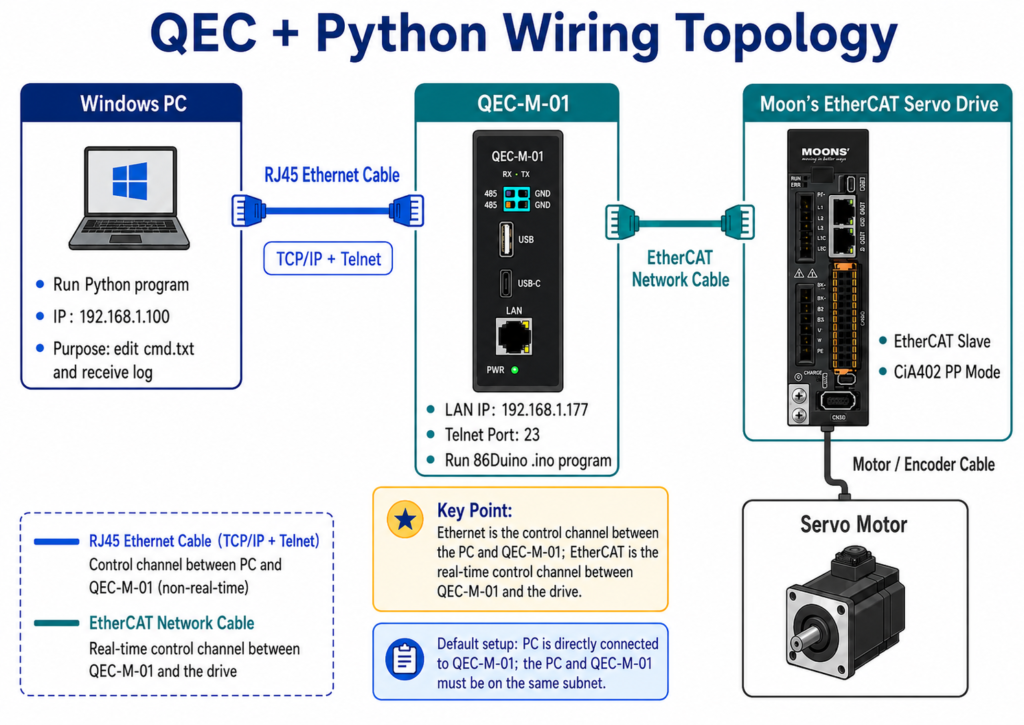
4. 所需設備
- QEC-M-01 EtherCAT 主站
- Moon's EtherCAT 伺服驅動器,相容 CiA402
- Windows PC
- 乙太網路纜線
- 86Duino IDE
- 建議使用 Python 3.10.x
5. 重要提示
本教學中的 Telnet 僅用於封閉區域網路或實驗室環境的示範與測試。
在量產系統中,請根據需求使用具備身份驗證、指令驗證或加密的受控 TCP/Socket 協定。
6. 資源
請於下方下載完整的開發指南與原始碼。
- 開發指南 PDF: QEC_DevGuide_Python_Telnet_EN_v1r2 | QEC_DevGuide_Python_Telnet_ZH_v1r2
- 86Duino 端原始碼:
QEC_Python_Telnet_86DuinoCode.zip - PC 端 Python 原始碼
QEC_Python_Telnet_PythonCode.zip
7. 後續延伸
本範例可延伸至多軸 EtherCAT 控制、Python GUI 工具、自訂 HMI 軟體、資料記錄、SCADA/MES 整合或自動化測試系統。