このチュートリアルでは、標準的なイーサネットを介して Python を使用して EtherCAT モーターをリモート制御する方法を示します。
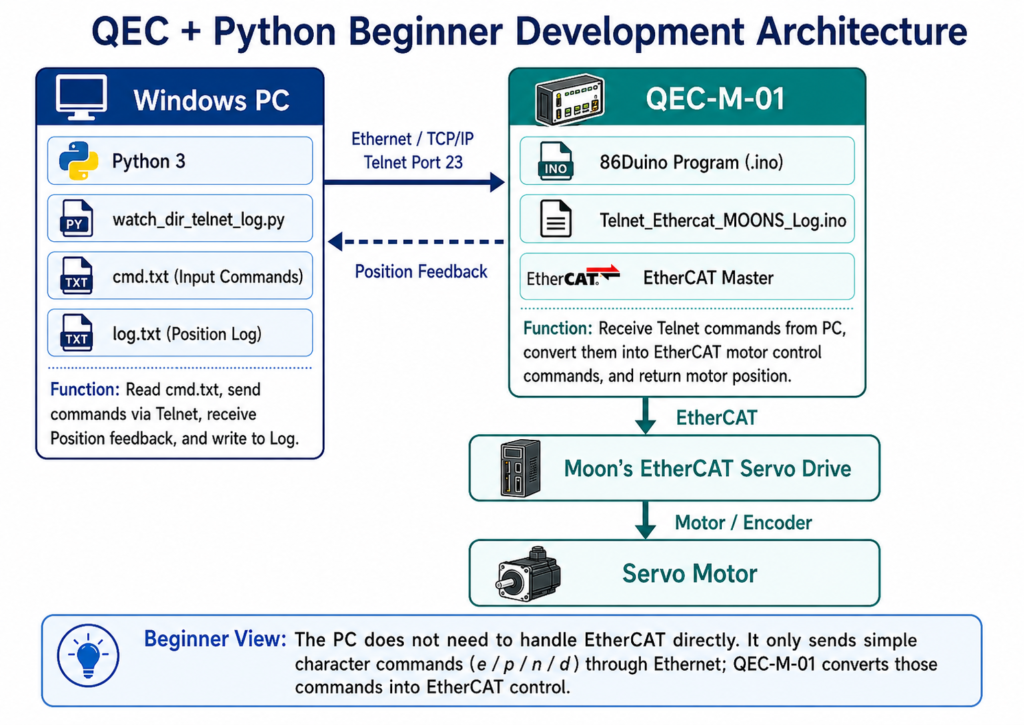
Windows PC は 86Duino スケッチを実行している QEC-M-01 にシンプルなコマンドを送信します。QEC-M-01 が EtherCAT CiA402 モーター制御を処理し、ログ記録用にモーター位置フィードバックを返します。
PC 側は EtherCAT を直接処理する必要はありません。TCP/IP コマンドを送信するだけで、QEC-M-01 がそれをリアルタイム EtherCAT モーター制御アクションに変換します。
1. 概要
このサンプルでできること:
- Windows PC から Moon's EtherCAT サーボドライブを制御
- シンプルな
cmd.txtファイルでモーターコマンドを送信 - モーター位置フィードバックを
log.txt - Python を使用したクイックテスト・データログ・上位オートメーション
- QEC-M-01 上でリアルタイム EtherCAT 制御を維持
PC 側に特別な EtherCAT SDK は不要です。
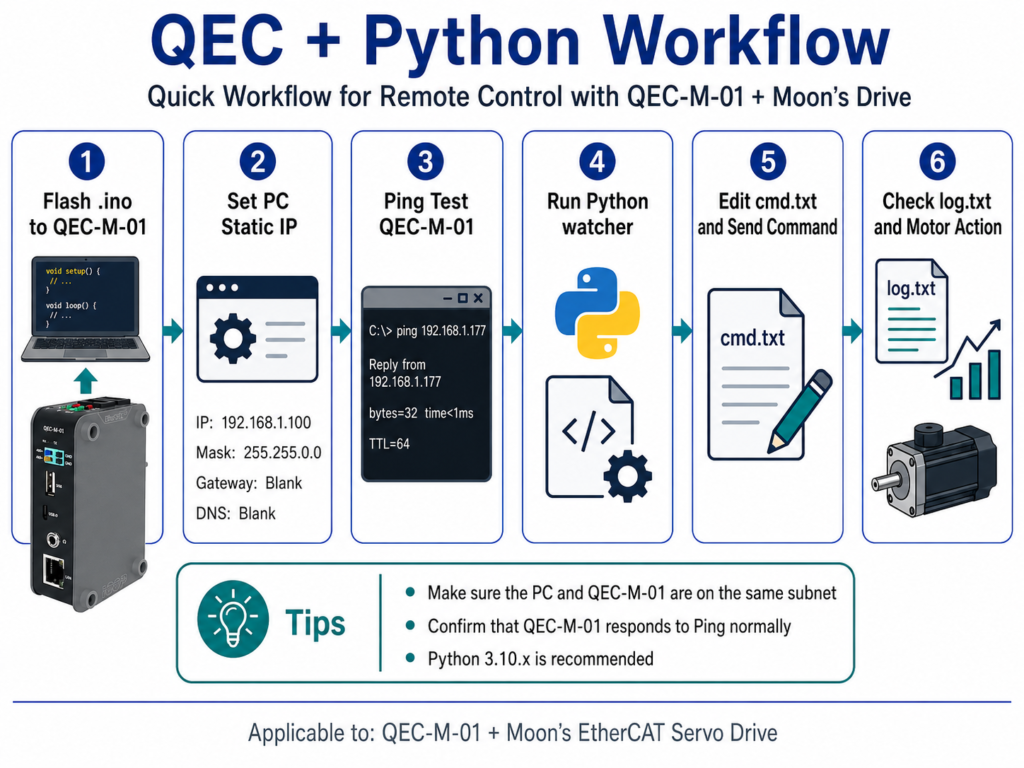
2. ワークフロー
ワークフローはシンプルです:
- Flash the
.inoスケッチを QEC-M-01 に書き込む - PC の静的 IP を設定する
- QEC-M-01 に Ping する
- Python ウォッチャーを実行する
- 編集
cmd.txtを編集してコマンドを送信する - 確認する
log.txtとモーター動作を
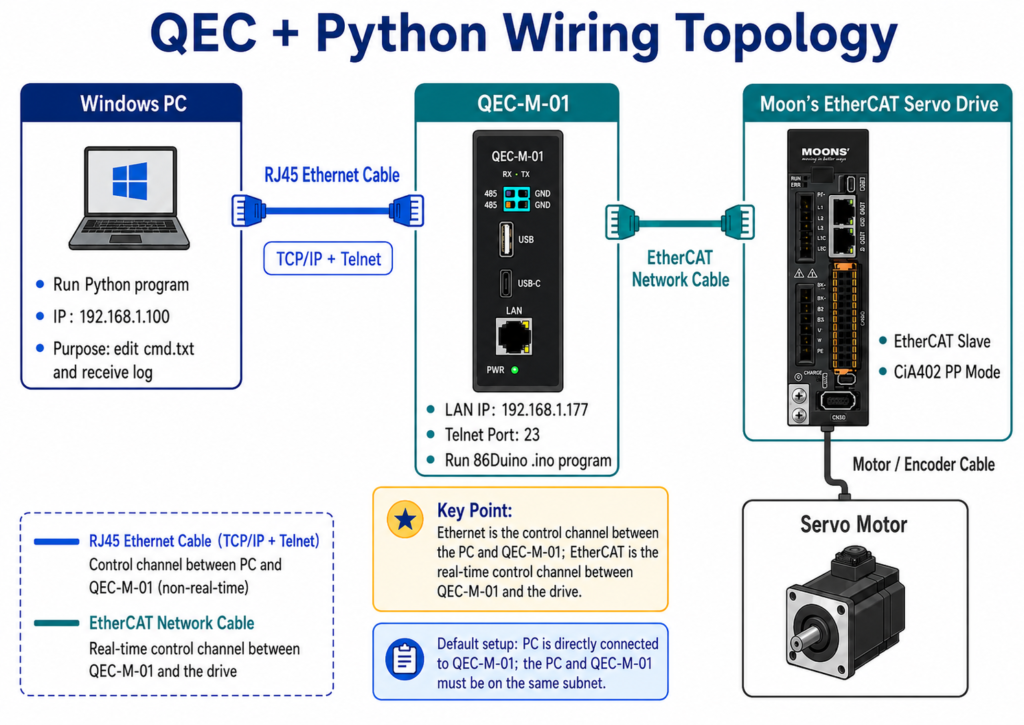
この例では、QEC-M-01 は 192.168.1.177、PC は 192.168.1.100.
3. コマンド例
Python ウォッチャーの実行後、 cmd.txt を編集して保存するとモーターを制御できます。
| cmd.txt | アクション | 説明 |
|---|---|---|
e | Enable | モーターを有効化する |
p | Move + | +100,000 パルスへ移動 |
n | Move – | -100,000 パルスへ移動 |
d | Disable | モーターを無効化する |
Python プログラムはファイルの変更を自動検出し、QEC-M-01 にコマンドを送信します。
4. 必要なもの
- QEC-M-01 EtherCAT Mデバイス
- Moon's EtherCAT サーボドライブ(CiA402 対応)
- Windows PC
- イーサネットケーブル
- 86Duino IDE
- Python 3.10.x 推奨
5. 重要な注意事項
このチュートリアルの Telnet は、閉じた LAN またはラボ環境でのデモとテスト用途に使用しています。
本番システムでは、必要に応じて認証・コマンド検証・暗号化を備えた制御された TCP/Socket プロトコルを使用してください。
6. リソース
完全な開発ガイドとソースコードを以下からダウンロードしてください。
- 開発ガイド PDF : QEC_DevGuide_Python_Telnet_EN_v1r2 | QEC_DevGuide_Python_Telnet_ZH_v1r2
- 86Duino 側ソースコード
QEC_Python_Telnet_86DuinoCode.zip - PC 側 Python ソースコード
QEC_Python_Telnet_PythonCode.zip
7. 次のステップ
このサンプルは、多軸 EtherCAT 制御・Python GUI ツール・カスタム HMI ソフトウェア・データログ・SCADA/MES 統合・自動テストシステムなどに拡張できます。